Motivation
- Traditional validation requires extensive real-world testing to achieve the confidence levels needed for safety assurances and certification
- Simulation-only validation would be much cheaper, but simulators are not yet accurate enough for standalone validation, and would shift the problem to that of validating a simulator
- Goal: Combine real-world and simulation testing to reduce real-world data requirements for validation
Method
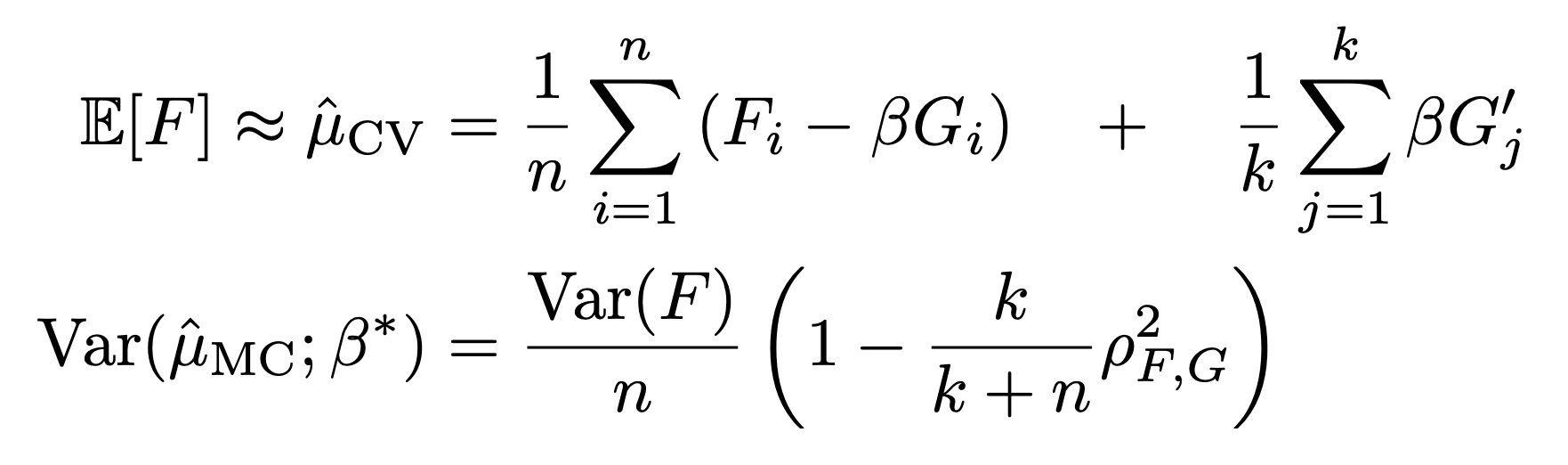
Idea: Use simulation as a control variate!
- With a control variate – a correlated signal whose expectation is known – we can reduce the variance of our estimator
- Simulation measurements are correlated with real-world measurements
- Because the true simulation mean is unknown, we estimate it from the sim-only data
Sim2Val estimates the true metrics mean by combining the paired real-world and simulation measurements.
- Note that variance reduction is a function of the scale of sim-only data (k) and the correlation (ρ2) between real-world and simulation measurements.
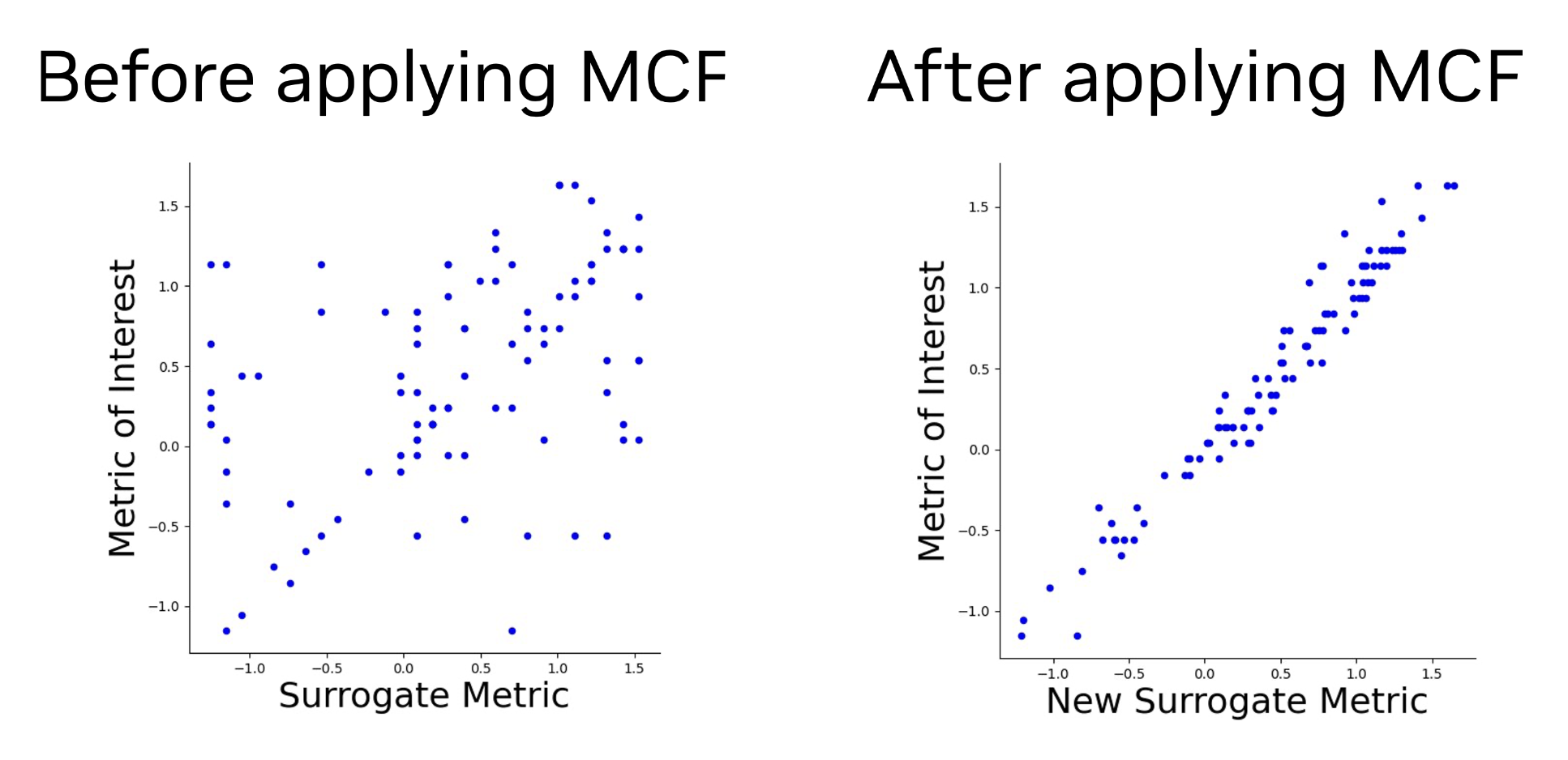
If the original paired observations have low correlation:
- We can learn a nonlinear metric correlator function (MCF) mapping scenario features + sim measurements → a refined surrogate metric
- We can then use the new surrogate as a control variate:
Examples of Paired Scenarios
A real-world test (top) is reconstructed in simulation (bottom) to obtain a paired measurement.
Results
Sim2Val Autonomous Driving Performance
By leveraging inexpensive sim samples, we can achieve equivalent confidence level as using ~6x the number of expensive real-world samples! (Variance reduction of 82.9%)
Sim2Val Quadruped Velocity Tracking
Note that even the relatively modest reduction in variance from 2.048E−5 to 1.926E−5 would have required 38% more real-world tests without sim!
BibTeX
@inproceedings{luo2025_sim2val,
title = {Sim2Val: Leveraging Correlation Across Test Platforms for Variance-Reduced Metric Estimation},
author = {Rachel Luo and Heng Yang and Michael Watson and Apoorva Sharma and Sushant Veer and Edward Schmerling and Marco Pavone},
booktitle = {Proceedings of the Conference on Robot Learning (CoRL)},
year = {2025},
}