mindmap Overview#

Humanoid robot performing the |
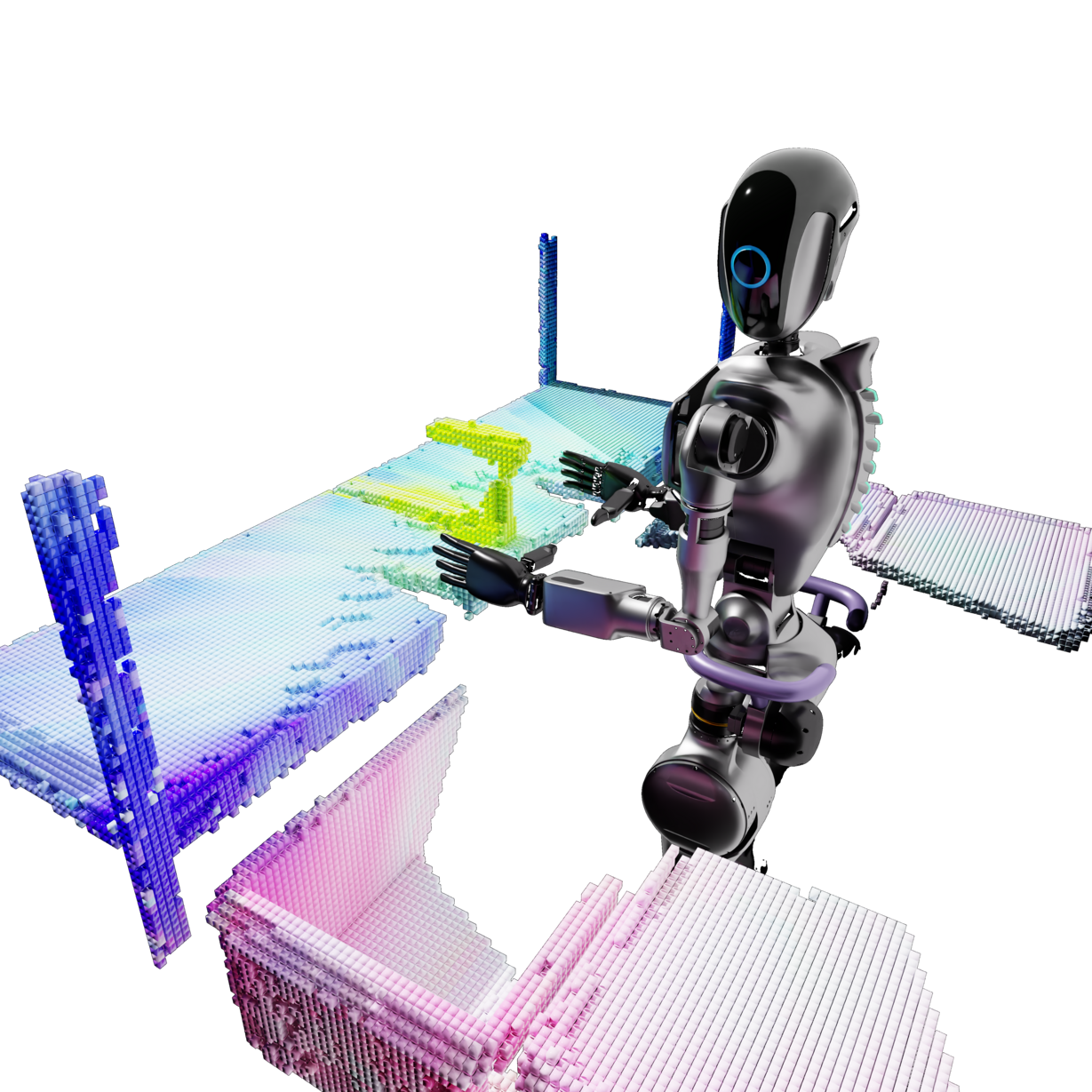
Deep feature map (colored by PCA) that enables spatial memory for the |
What is mindmap?#
mindmap is a 3D diffusion policy that generates robot trajectories based on semantic 3D reconstruction of the environment. Unlike traditional approaches that rely solely on current visual input, mindmap maintains spatial memory through deep feature maps, enabling robots to perform complex manipulation tasks that require remembering the layout of the environment and the locations of objects.
Our mindmap paper demonstrates that mindmap effectively solves manipulation tasks where state-of-the-art approaches without memory mechanisms struggle. Through extensive simulation experiments, we show significant improvements in task success rates for scenarios requiring spatial memory.
mindmap builds upon the nvblox codebase, which provides a GPU-accelerated reconstruction system wrapped in PyTorch. This system is essential for building the deep feature maps that enable spatial memory in mindmap.
Open Source Release#
We release our complete codebase including:
Reconstruction System: Real-time 3D mapping and feature extraction
Training Code: End-to-end model training pipeline
Evaluation Tasks: Four benchmark tasks for spatial memory testing
Pre-trained Models: Ready-to-use checkpoints for immediate evaluation
Note
This project will download and install additional third-party open source software projects. Review the license terms of these open source projects before use.
System Requirements#
Architecture:
mindmapis only supported on x86 architecture.OS: The
mindmapcontainer is only supported on Linux.GPU: We recommend using a discrete NVIDIA GPU with at least 16GB of VRAM.
Simulation:
mindmapis using Isaac Lab 2.1.0 / Isaac Sim 4.5.0 for simulation. Make sure your system meets the simulation requirements.
Getting Started#
To begin using mindmap:
Follow the setup instructions in Setting up mindmap
Choose a workflow from Example Workflows
Explore the available tasks in mindmap Tasks
License#
This project is licensed under the NVIDIA License (NSCLv1). See LICENSE.md for details.
Papers#
If you find mindmap useful for your research, please consider citing our work:
Remo Steiner, Alexander Millane, David Tingdahl, Clemens Volk, Vikram Ramasamy, Xinjie Yao, Peter Du, Soha Pouya and Shiwei Sheng. “mindmap: Spatial Memory in Deep Feature Maps for 3D Action Policies”. CoRL 2025 Workshop RemembeRL. arXiv preprint arXiv:2509.20297 (2025).
Alexander Millane, Helen Oleynikova, Emilie Wirbel, Remo Steiner, Vikram Ramasamy, David Tingdahl, and Roland Siegwart. “nvblox: GPU-Accelerated Incremental Signed Distance Field Mapping”. ICRA 2024. arXiv preprint arXiv:2311.00626 (2024).
Documentation Structure#
Getting Started
Data Generation
Training
Evaluation
API Reference
Downloads