Weighted Belief Propagation Decoding#
This notebooks implements the Weighted Belief Propagation (BP) algorithm as proposed by Nachmani et al. in [1]. The main idea is to leverage BP decoding by additional trainable weights that scale each outgoing variable node (VN) and check node (CN) message. These weights provide additional degrees of freedom and can be trained by stochastic gradient descent (SGD) to improve the BP performance for the given code. If all weights are initialized with 1, the algorithm equals the classical BP algorithm and, thus, the concept can be seen as a generalized BP decoder.
Our main focus is to show how Sionna can lower the barrier-to-entry for state-of-the-art research. For this, you will investigate:
How to implement the multi-loss BP decoding with Sionna
How a single scaling factor can lead to similar results
What happens for training of the 5G LDPC code
The setup includes the following components:
LDPC BP Decoder
Gaussian LLR source
Please note that we implement a simplified version of the original algorithm consisting of two major simplifications:
) Only outgoing variable node (VN) messages are weighted. This is possible as the VN operation is linear and it would only increase the memory complexity without increasing the expressive power of the neural network.
) We use the same shared weights for all iterations. This can potentially influence the final performance, however, simplifies the implementation and allows to run the decoder with different number of iterations.
Note: If you are not familiar with all-zero codeword-based simulations please have a look into the Bit-Interleaved Coded Modulation example notebook first.
Table of Contents#

Configuration and Imports#
[1]:
# Import Sionna
try:
import sionna.phy
except ImportError as e:
import os
import sys
if 'google.colab' in sys.modules:
# Install Sionna in Google Colab
print("Installing Sionna and restarting the runtime. Please run the cell again.")
os.system("pip install sionna")
os.kill(os.getpid(), 5)
else:
raise e
import torch
import torch.nn.functional as F
sionna.phy.config.seed = 42 # Set seed for reproducible random number generation
device = sionna.phy.config.device
# Import required Sionna components
from sionna.phy.fec.ldpc import LDPCBPDecoder, LDPC5GEncoder, LDPC5GDecoder, WeightedBPCallback
from sionna.phy.fec.utils import GaussianPriorSource, load_parity_check_examples, llr2mi
from sionna.phy.utils import ebnodb2no, hard_decisions
from sionna.phy.utils.metrics import compute_ber
from sionna.phy.utils.plotting import PlotBER
from sionna.phy import Block
%matplotlib inline
import matplotlib.pyplot as plt
import numpy as np
print(f"Using device: {device}")
Using device: cuda:0
Weighted BP for BCH Codes#
First, we define the trainable model consisting of:
LDPC BP decoder
Gaussian LLR source
The idea of the multi-loss function in [1] is to average the loss overall iterations, i.e., not just the final estimate is evaluated. This requires to call the BP decoder iteration-wise by setting num_iter=1 and return_state=True such that the decoder will perform a single iteration and returns its current estimate while also providing the internal messages for the next iteration.
A few comments:
We assume the transmission of the all-zero codeword. This allows to train and analyze the decoder without the need of an encoder. Remark: The final decoder can be used for arbitrary codewords.
We directly generate the channel LLRs with
GaussianPriorSource. The equivalent LLR distribution could be achieved by transmitting the all-zero codeword over an AWGN channel with BPSK modulation.For the proposed multi-loss [1] (i.e., the loss is averaged over all iterations), we need to access the decoders intermediate output after each iteration. This is done by calling the decoding function multiple times while setting
return_stateto True, i.e., the decoder continuous the decoding process at the last message state.
The BP decoder itself does not have any trainable weights. However, the LDPCBPDecoder API allows to register custom callback functions after each VN/CN node update step. In this tutorial, we use the WeightedBPCallback to apply trainable weights to each exchanged internal decoder message. Similarly, offset-corrected BP can be made trainable.
[2]:
class WeightedBP(Block):
"""System model for BER simulations of weighted BP decoding.
This model uses `GaussianPriorSource` to mimic the LLRs after demapping of
QPSK symbols transmitted over an AWGN channel.
Parameters
----------
pcm: ndarray
The parity-check matrix of the code under investigation.
num_iter: int
Number of BP decoding iterations.
Input
-----
batch_size: int
The batch_size used for the simulation.
ebno_db: float
A float defining the simulation SNR.
Output
------
(u, u_hat, loss):
Tuple:
u: torch.Tensor
A tensor of shape `[batch_size, k] of 0s and 1s containing the transmitted information bits.
u_hat: torch.Tensor
A tensor of shape `[batch_size, k] of 0s and 1s containing the estimated information bits.
loss: torch.Tensor
Binary cross-entropy loss between `u` and `u_hat`.
"""
def __init__(self, pcm, num_iter=5):
super().__init__()
# add trainable weights via decoder callbacks
# Pass PCM to enable proper weight application in padded format
self.edge_weights = WeightedBPCallback(num_edges=np.sum(pcm), pcm=pcm)
# init components
self.decoder = LDPCBPDecoder(pcm,
num_iter=1, # iterations are done via outer loop (to access intermediate results for multi-loss)
return_state=True, # decoder stores internal messages after call
hard_out=False, # we need to access soft-information
cn_update="boxplus",
v2c_callbacks=[self.edge_weights]) # register callback to make the decoder trainable
# used to generate llrs during training (see example notebook on all-zero codeword trick)
self.llr_source = GaussianPriorSource()
self._num_iter = num_iter
def call(self, batch_size, ebno_db):
noise_var = ebnodb2no(ebno_db,
num_bits_per_symbol=2, # QPSK
coderate=self.decoder.coderate)
# all-zero CW to calculate loss / BER
c = torch.zeros(batch_size, self.decoder.n, device=self.device)
# Gaussian LLR source
llr = self.llr_source([batch_size, self.decoder.n], no=noise_var)
# --- implement multi-loss as proposed by Nachmani et al. [1]---
loss = 0.0
msg_v2c = None # internal state of decoder
for i in range(self._num_iter):
c_hat, msg_v2c = self.decoder(llr, msg_v2c=msg_v2c) # perform one decoding iteration; decoder returns soft-values
loss = loss + F.binary_cross_entropy_with_logits(c_hat, c) # add loss after each iteration
loss = loss / self._num_iter # scale loss by number of iterations
return c, c_hat, loss
Load a parity-check matrix used for the experiment. We use the same BCH(63,45) code as in [1]. The code can be replaced by any parity-check matrix of your choice.
[3]:
pcm_id = 1 # (63,45) BCH code parity check matrix
pcm, k , n, coderate = load_parity_check_examples(pcm_id=pcm_id, verbose=True)
num_iter = 10 # set number of decoding iterations
# and initialize the model
model = WeightedBP(pcm=pcm, num_iter=num_iter)
model.to(device)
n: 63, k: 45, coderate: 0.714
[3]:
WeightedBP(
(edge_weights): WeightedBPCallback()
(decoder): LDPCBPDecoder()
(llr_source): GaussianPriorSource()
)
Note: weighted BP tends to work better for small number of iterations. The effective gains (compared to the baseline with same number of iterations) vanish with more iterations.
Weights before Training and Simulation of BER#
Let us plot the weights after initialization of the decoder to verify that everything is properly initialized. This is equivalent the classical BP decoder.
[4]:
# count number of weights/edges
print("Total number of weights: ", model.edge_weights.weights.numel())
# and show the weight distribution
model.edge_weights.show_weights()
Total number of weights: 432
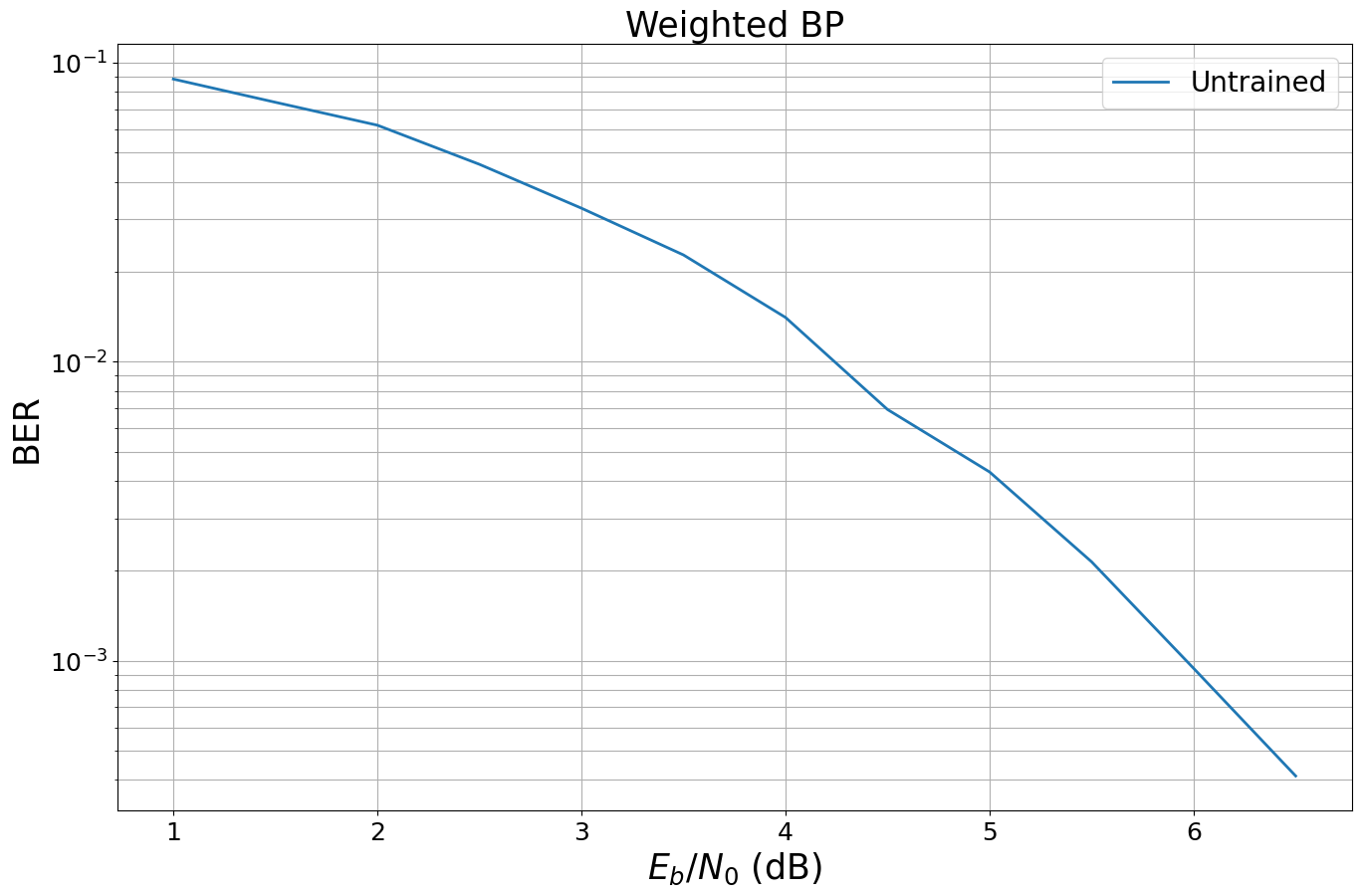
We first simulate (and store) the BER performance before training. For this, we use the PlotBER class, which provides a convenient way to store the results for later comparison.
[5]:
# SNR to simulate the results
ebno_dbs = np.array(np.arange(1, 7, 0.5))
mc_iters = 100 # number of Monte Carlo iterations
# we generate a new PlotBER() object to simulate, store and plot the BER results
ber_plot = PlotBER("Weighted BP")
# simulate and plot the BER curve of the untrained decoder
ber_plot.simulate(model,
ebno_dbs=ebno_dbs,
batch_size=1000,
num_target_bit_errors=2000, # stop sim after 2000 bit errors
legend="Untrained",
soft_estimates=True,
max_mc_iter=mc_iters,
forward_keyboard_interrupt=False,
compile_mode=None);
EbNo [dB] | BER | BLER | bit errors | num bits | block errors | num blocks | runtime [s] | status
---------------------------------------------------------------------------------------------------------------------------------------
1.0 | 8.8190e-02 | 9.5900e-01 | 5556 | 63000 | 959 | 1000 | 0.2 |reached target bit errors
1.5 | 7.3762e-02 | 9.0600e-01 | 4647 | 63000 | 906 | 1000 | 0.0 |reached target bit errors
2.0 | 6.1825e-02 | 8.3300e-01 | 3895 | 63000 | 833 | 1000 | 0.0 |reached target bit errors
2.5 | 4.5746e-02 | 6.8400e-01 | 2882 | 63000 | 684 | 1000 | 0.0 |reached target bit errors
3.0 | 3.2635e-02 | 5.0600e-01 | 2056 | 63000 | 506 | 1000 | 0.0 |reached target bit errors
3.5 | 2.2770e-02 | 3.7400e-01 | 2869 | 126000 | 748 | 2000 | 0.0 |reached target bit errors
4.0 | 1.4074e-02 | 2.3267e-01 | 2660 | 189000 | 698 | 3000 | 0.0 |reached target bit errors
4.5 | 6.9270e-03 | 1.2940e-01 | 2182 | 315000 | 647 | 5000 | 0.0 |reached target bit errors
5.0 | 4.2837e-03 | 8.1250e-02 | 2159 | 504000 | 650 | 8000 | 0.1 |reached target bit errors
5.5 | 2.1450e-03 | 4.2333e-02 | 2027 | 945000 | 635 | 15000 | 0.1 |reached target bit errors
6.0 | 9.4444e-04 | 1.8000e-02 | 2023 | 2142000 | 612 | 34000 | 0.3 |reached target bit errors
6.5 | 4.1249e-04 | 8.6026e-03 | 2027 | 4914000 | 671 | 78000 | 0.6 |reached target bit errors
Training#
We now train the model for a fixed number of SGD training iterations.
Note: this is a very basic implementation of the training loop. You can also try more sophisticated training loops with early stopping, different hyper-parameters or optimizers etc.
[6]:
# training parameters
batch_size = 1000
train_iter = 200
ebno_db = 4.0
clip_value_grad = 10 # gradient clipping for stable training convergence
# try also different optimizers or different hyperparameters
optimizer = torch.optim.Adam(model.parameters(), lr=1e-2)
for it in range(0, train_iter):
optimizer.zero_grad()
b, llr, loss = model(batch_size, ebno_db)
loss.backward()
torch.nn.utils.clip_grad_value_(model.parameters(), clip_value_grad)
optimizer.step()
# calculate and print intermediate metrics
# only for information
# this has no impact on the training
if it%10==0: # evaluate every 10 iterations
with torch.no_grad():
# calculate ber from received LLRs
b_hat = hard_decisions(llr) # hard decided LLRs first
ber = compute_ber(b, b_hat)
# and print results
mi = llr2mi(llr, -2*b+1).item() # calculate bit-wise mutual information
l = loss.item() # copy loss for printing
print(f"Iteration {it}/{train_iter} - Loss: {l:.3f} BER: {ber:.4f} BMI: {mi:.3f}")
Iteration 0/200 - Loss: 0.053 BER: 0.0129 BMI: 0.944
Iteration 10/200 - Loss: 0.046 BER: 0.0118 BMI: 0.947
Iteration 20/200 - Loss: 0.047 BER: 0.0129 BMI: 0.943
Iteration 30/200 - Loss: 0.052 BER: 0.0139 BMI: 0.933
Iteration 40/200 - Loss: 0.042 BER: 0.0129 BMI: 0.943
Iteration 50/200 - Loss: 0.040 BER: 0.0120 BMI: 0.952
Iteration 60/200 - Loss: 0.043 BER: 0.0138 BMI: 0.946
Iteration 70/200 - Loss: 0.041 BER: 0.0134 BMI: 0.946
Iteration 80/200 - Loss: 0.043 BER: 0.0136 BMI: 0.941
Iteration 90/200 - Loss: 0.042 BER: 0.0136 BMI: 0.949
Iteration 100/200 - Loss: 0.041 BER: 0.0127 BMI: 0.947
Iteration 110/200 - Loss: 0.042 BER: 0.0138 BMI: 0.949
Iteration 120/200 - Loss: 0.043 BER: 0.0137 BMI: 0.945
Iteration 130/200 - Loss: 0.042 BER: 0.0133 BMI: 0.947
Iteration 140/200 - Loss: 0.039 BER: 0.0127 BMI: 0.951
Iteration 150/200 - Loss: 0.042 BER: 0.0127 BMI: 0.947
Iteration 160/200 - Loss: 0.039 BER: 0.0128 BMI: 0.953
Iteration 170/200 - Loss: 0.038 BER: 0.0126 BMI: 0.953
Iteration 180/200 - Loss: 0.044 BER: 0.0133 BMI: 0.941
Iteration 190/200 - Loss: 0.038 BER: 0.0125 BMI: 0.953
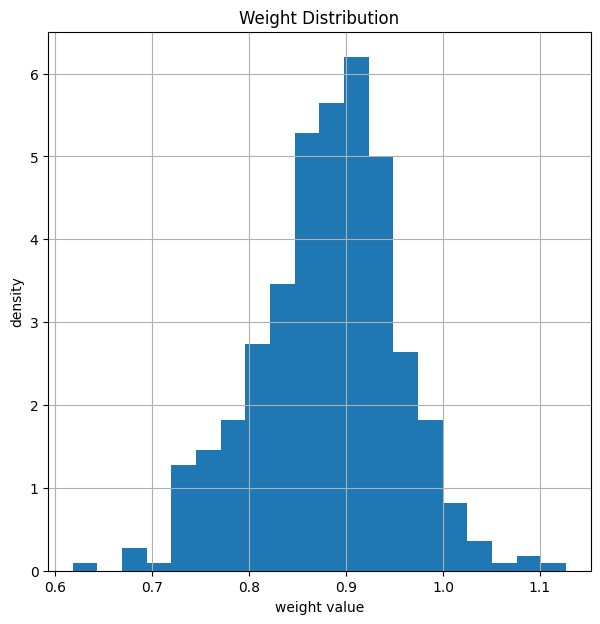
Results#
After training, the weights of the decoder have changed. In average, the weights are smaller after training.
[7]:
model.edge_weights.show_weights() # show weights AFTER training
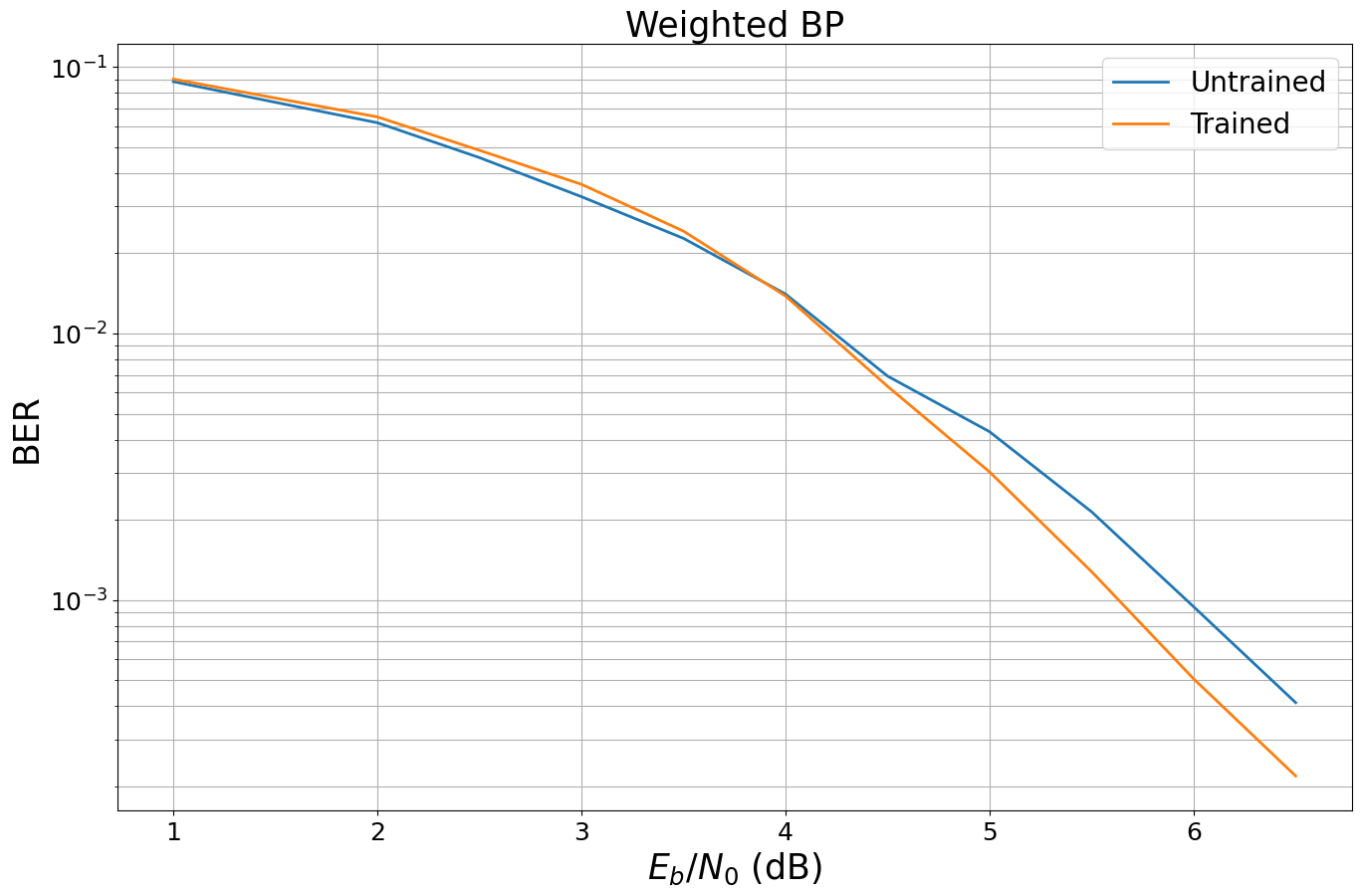
And let us compare the new BER performance. For this, we can simply call the ber_plot.simulate() function again as it internally stores all previous results (if add_results is True).
[8]:
ebno_dbs = np.array(np.arange(1, 7, 0.5))
batch_size = 10000
mc_ites = 100
ber_plot.simulate(model,
ebno_dbs=ebno_dbs,
batch_size=1000,
num_target_bit_errors=2000, # stop sim after 2000 bit errors
legend="Trained",
max_mc_iter=mc_iters,
soft_estimates=True,
compile_mode=None);
EbNo [dB] | BER | BLER | bit errors | num bits | block errors | num blocks | runtime [s] | status
---------------------------------------------------------------------------------------------------------------------------------------
1.0 | 9.0159e-02 | 9.9800e-01 | 5680 | 63000 | 998 | 1000 | 0.0 |reached target bit errors
1.5 | 7.6524e-02 | 9.7200e-01 | 4821 | 63000 | 972 | 1000 | 0.0 |reached target bit errors
2.0 | 6.5016e-02 | 9.3300e-01 | 4096 | 63000 | 933 | 1000 | 0.0 |reached target bit errors
2.5 | 4.8714e-02 | 8.2400e-01 | 3069 | 63000 | 824 | 1000 | 0.0 |reached target bit errors
3.0 | 3.6317e-02 | 6.5800e-01 | 2288 | 63000 | 658 | 1000 | 0.0 |reached target bit errors
3.5 | 2.4238e-02 | 4.4900e-01 | 3054 | 126000 | 898 | 2000 | 0.0 |reached target bit errors
4.0 | 1.3831e-02 | 2.7067e-01 | 2614 | 189000 | 812 | 3000 | 0.0 |reached target bit errors
4.5 | 6.3413e-03 | 1.3150e-01 | 2397 | 378000 | 789 | 6000 | 0.0 |reached target bit errors
5.0 | 3.0260e-03 | 6.5000e-02 | 2097 | 693000 | 715 | 11000 | 0.1 |reached target bit errors
5.5 | 1.2787e-03 | 3.0240e-02 | 2014 | 1575000 | 756 | 25000 | 0.2 |reached target bit errors
6.0 | 5.0642e-04 | 1.3571e-02 | 2010 | 3969000 | 855 | 63000 | 0.5 |reached target bit errors
6.5 | 2.1889e-04 | 5.9900e-03 | 1379 | 6300000 | 599 | 100000 | 0.8 |reached max iterations
Further Experiments#
You will now see that the memory footprint can be drastically reduced by using the same weight for all messages. In the second part we will apply the concept to the 5G LDPC codes.
Damped BP#
It is well-known that scaling of LLRs / messages can help to improve the performance of BP decoding in some scenarios [3,4]. In particular, this works well for very short codes such as the code we are currently analyzing.
We now follow the basic idea of [2] and scale all weights with the same scalar.
[9]:
# get weights of trained model
weights_bp = model.edge_weights.weights
# calc mean value of weights
damping_factor = weights_bp.mean()
# set all weights to the SAME constant scaling
weights_damped = torch.ones_like(weights_bp) * damping_factor
# and apply the new weights
with torch.no_grad():
model.edge_weights.weights.copy_(weights_damped)
# let us have look at the new weights again
model.edge_weights.show_weights()
# and simulate the BER again
leg_str = f"Damped BP (scaling factor {damping_factor.item():.3f})"
ber_plot.simulate(model,
ebno_dbs=ebno_dbs,
batch_size=1000,
num_target_bit_errors=2000, # stop sim after 2000 bit errors
legend=leg_str,
max_mc_iter=mc_iters,
soft_estimates=True,
compile_mode=None);
EbNo [dB] | BER | BLER | bit errors | num bits | block errors | num blocks | runtime [s] | status
---------------------------------------------------------------------------------------------------------------------------------------
1.0 | 8.8556e-02 | 9.9200e-01 | 5579 | 63000 | 992 | 1000 | 0.0 |reached target bit errors
1.5 | 7.5921e-02 | 9.7300e-01 | 4783 | 63000 | 973 | 1000 | 0.0 |reached target bit errors
2.0 | 6.4794e-02 | 9.3000e-01 | 4082 | 63000 | 930 | 1000 | 0.0 |reached target bit errors
2.5 | 4.8952e-02 | 7.9600e-01 | 3084 | 63000 | 796 | 1000 | 0.0 |reached target bit errors
3.0 | 3.6683e-02 | 6.3000e-01 | 2311 | 63000 | 630 | 1000 | 0.0 |reached target bit errors
3.5 | 2.3048e-02 | 4.2250e-01 | 2904 | 126000 | 845 | 2000 | 0.0 |reached target bit errors
4.0 | 1.2291e-02 | 2.3567e-01 | 2323 | 189000 | 707 | 3000 | 0.0 |reached target bit errors
4.5 | 6.0926e-03 | 1.2400e-01 | 2303 | 378000 | 744 | 6000 | 0.0 |reached target bit errors
5.0 | 3.0303e-03 | 6.5091e-02 | 2100 | 693000 | 716 | 11000 | 0.1 |reached target bit errors
5.5 | 1.3225e-03 | 3.0520e-02 | 2083 | 1575000 | 763 | 25000 | 0.2 |reached target bit errors
6.0 | 5.4049e-04 | 1.3475e-02 | 2009 | 3717000 | 795 | 59000 | 0.4 |reached target bit errors
6.5 | 2.3206e-04 | 6.0500e-03 | 1462 | 6300000 | 605 | 100000 | 0.8 |reached max iterations
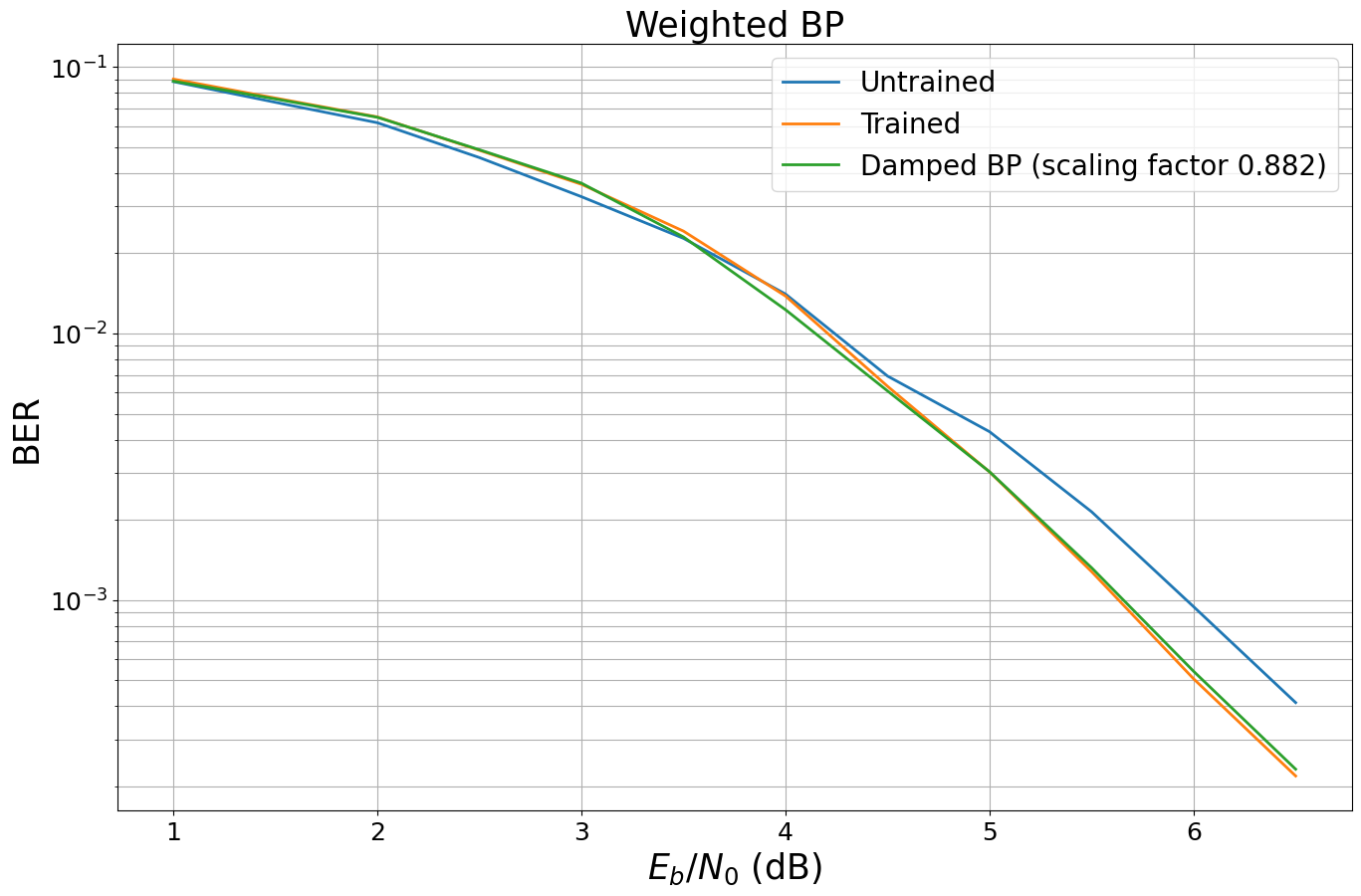
When looking at the results, we observe almost the same performance although we only scale by a single scalar. This implies that the number of weights of our model is by far too large and the memory footprint could be reduced significantly. However, isn’t it fascinating to see that this simple concept of weighted BP leads to the same results as the concept of damped BP?
Note: for more iterations it could be beneficial to implement an individual damping per iteration.
Learning the 5G LDPC Code#
In this Section, you will experience what happens if we apply the same concept to the 5G LDPC code (including rate matching).
For this, we need to define a new model.
[10]:
class WeightedBP5G(Block):
"""System model for BER simulations of weighted BP decoding for 5G LDPC codes.
This model uses `GaussianPriorSource` to mimic the LLRs after demapping of
QPSK symbols transmitted over an AWGN channel.
Parameters
----------
k: int
Number of information bits per codeword.
n: int
Codeword length.
num_iter: int
Number of BP decoding iterations.
Input
-----
batch_size: int
The batch_size used for the simulation.
ebno_db: float
A float defining the simulation SNR.
Output
------
(u, u_hat, loss):
Tuple:
u: torch.Tensor
A tensor of shape `[batch_size, k] of 0s and 1s containing the transmitted information bits.
u_hat: torch.Tensor
A tensor of shape `[batch_size, k] of 0s and 1s containing the estimated information bits.
loss: torch.Tensor
Binary cross-entropy loss between `u` and `u_hat`.
"""
def __init__(self, k, n, num_iter=20):
super().__init__()
self._k = k
self._n = n
# we need to initialize an encoder for the 5G parameters
self.encoder = LDPC5GEncoder(k, n)
# add trainable weights via decoder callbacks
# Pass PCM to enable proper weight application in padded format
self.edge_weights = WeightedBPCallback(
num_edges=int(np.sum(self.encoder.pcm)),
pcm=self.encoder.pcm)
self.decoder = LDPC5GDecoder(self.encoder,
num_iter=1, # iterations are done via outer loop (to access intermediate results for multi-loss)
return_state=True,
hard_out=False,
prune_pcm=False,
cn_update="boxplus",
v2c_callbacks=[self.edge_weights,]) # register callback
self.llr_source = GaussianPriorSource()
self._num_iter = num_iter
self._coderate = k/n
def call(self, batch_size, ebno_db):
noise_var = ebnodb2no(ebno_db,
num_bits_per_symbol=2, # QPSK
coderate=self._coderate)
# BPSK modulated all-zero CW
c = torch.zeros(batch_size, self._k, device=self.device) # decoder only returns info bits
# use fake llrs from GA
# works as BP is symmetric
llr = self.llr_source([batch_size, self._n], no=noise_var)
# --- implement multi-loss is proposed by Nachmani et al. ---
loss = 0.0
msg_v2c = None
for i in range(self._num_iter):
c_hat, msg_v2c = self.decoder(llr, msg_v2c=msg_v2c) # perform one decoding iteration; decoder returns soft-values
loss = loss + F.binary_cross_entropy_with_logits(c_hat, c) # add loss after each iteration
loss = loss / self._num_iter
return c, c_hat, loss
[11]:
# generate model
num_iter = 10
k = 400
n = 800
model5G = WeightedBP5G(k, n, num_iter=num_iter)
model5G.to(device)
# generate baseline BER
ebno_dbs = np.array(np.arange(0, 4, 0.25))
mc_iters = 100 # number of monte carlo iterations
ber_plot_5G = PlotBER("Weighted BP for 5G LDPC")
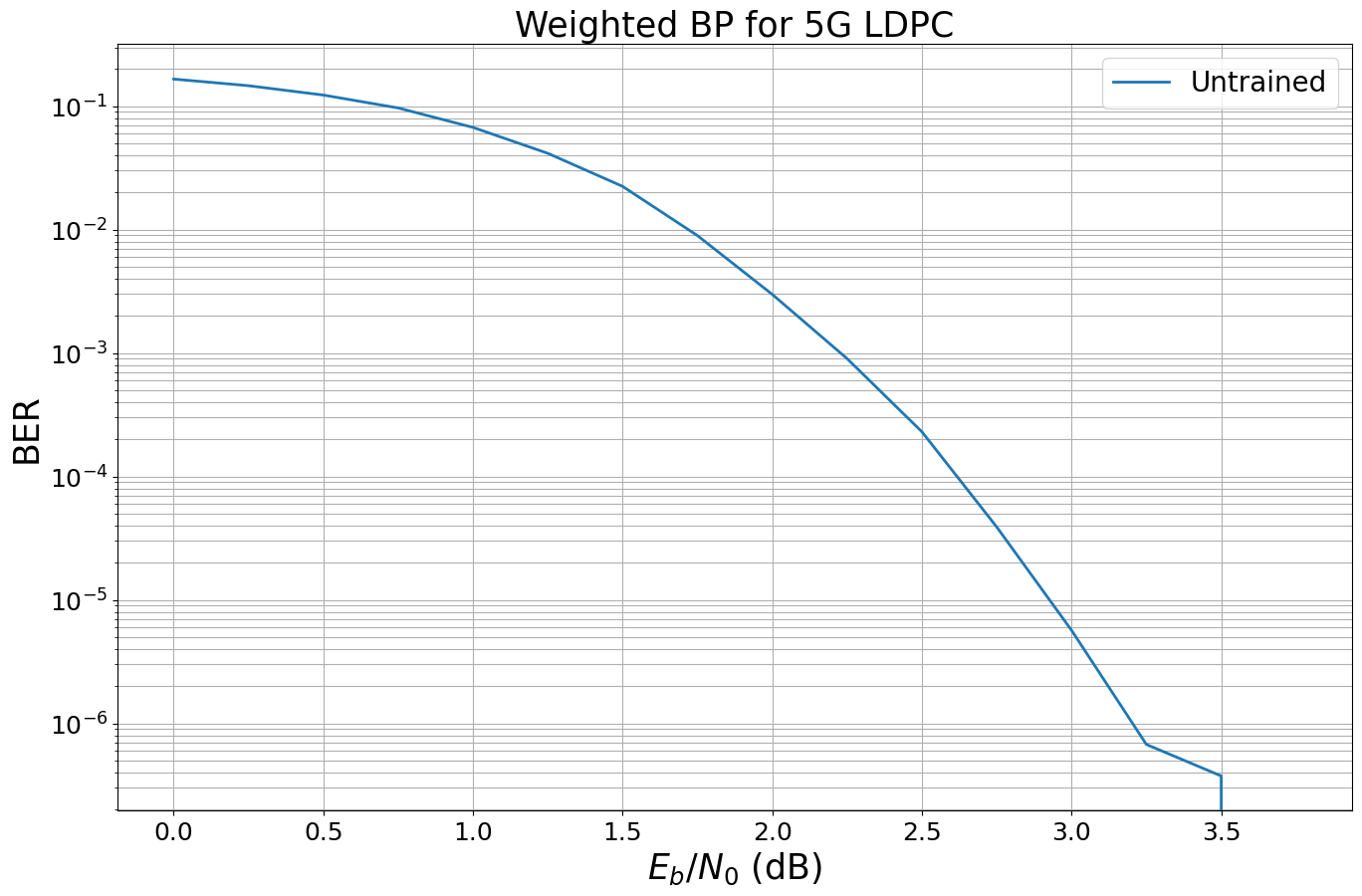
# simulate the untrained performance
ber_plot_5G.simulate(model5G,
ebno_dbs=ebno_dbs,
batch_size=1000,
num_target_bit_errors=2000, # stop sim after 2000 bit errors
legend="Untrained",
soft_estimates=True,
max_mc_iter=mc_iters,
compile_mode=None);
EbNo [dB] | BER | BLER | bit errors | num bits | block errors | num blocks | runtime [s] | status
---------------------------------------------------------------------------------------------------------------------------------------
0.0 | 1.6584e-01 | 1.0000e+00 | 66336 | 400000 | 1000 | 1000 | 0.1 |reached target bit errors
0.25 | 1.4654e-01 | 1.0000e+00 | 58616 | 400000 | 1000 | 1000 | 0.1 |reached target bit errors
0.5 | 1.2308e-01 | 9.9800e-01 | 49234 | 400000 | 998 | 1000 | 0.1 |reached target bit errors
0.75 | 9.6780e-02 | 9.8700e-01 | 38712 | 400000 | 987 | 1000 | 0.1 |reached target bit errors
1.0 | 6.7312e-02 | 9.3700e-01 | 26925 | 400000 | 937 | 1000 | 0.1 |reached target bit errors
1.25 | 4.1515e-02 | 8.2000e-01 | 16606 | 400000 | 820 | 1000 | 0.1 |reached target bit errors
1.5 | 2.2400e-02 | 6.2300e-01 | 8960 | 400000 | 623 | 1000 | 0.1 |reached target bit errors
1.75 | 8.9475e-03 | 3.6600e-01 | 3579 | 400000 | 366 | 1000 | 0.1 |reached target bit errors
2.0 | 2.9875e-03 | 1.8100e-01 | 2390 | 800000 | 362 | 2000 | 0.2 |reached target bit errors
2.25 | 9.0167e-04 | 6.8833e-02 | 2164 | 2400000 | 413 | 6000 | 0.7 |reached target bit errors
2.5 | 2.3023e-04 | 2.1818e-02 | 2026 | 8800000 | 480 | 22000 | 2.4 |reached target bit errors
2.75 | 3.8975e-05 | 5.2000e-03 | 1559 | 40000000 | 520 | 100000 | 11.0 |reached max iterations
3.0 | 5.6750e-06 | 9.4000e-04 | 227 | 40000000 | 94 | 100000 | 11.0 |reached max iterations
3.25 | 6.7500e-07 | 1.4000e-04 | 27 | 40000000 | 14 | 100000 | 13.3 |reached max iterations
3.5 | 3.7500e-07 | 4.0000e-05 | 15 | 40000000 | 4 | 100000 | 11.9 |reached max iterations
3.75 | 0.0000e+00 | 0.0000e+00 | 0 | 40000000 | 0 | 100000 | 11.3 |reached max iterations
Simulation stopped as no error occurred @ EbNo = 3.8 dB.
And let’s train this new model.
[12]:
# training parameters
batch_size = 1000
train_iter = 200
clip_value_grad = 10 # gradient clipping seems to be important
# smaller training SNR as the new code is longer (=stronger) than before
ebno_db = 1.5 # rule of thumb: train at ber = 1e-2
# try also different optimizers or different hyperparameters
optimizer = torch.optim.Adam(model5G.parameters(), lr=1e-2)
# and let's go
for it in range(0, train_iter):
optimizer.zero_grad()
b, llr, loss = model5G(batch_size, ebno_db)
loss.backward()
torch.nn.utils.clip_grad_value_(model5G.parameters(), clip_value_grad)
optimizer.step()
# calculate and print intermediate metrics
if it%10==0:
with torch.no_grad():
# calculate ber
b_hat = hard_decisions(llr)
ber = compute_ber(b, b_hat)
# and print results
mi = llr2mi(llr, -2*b+1).item() # calculate bit-wise mutual information
l = loss.item()
print(f"Iteration {it}/{train_iter} - Loss: {l:.3f} BER: {ber:.4f} BMI: {mi:.3f}")
Iteration 0/200 - Loss: 0.169 BER: 0.0194 BMI: 0.927
Iteration 10/200 - Loss: 0.174 BER: 0.0227 BMI: 0.917
Iteration 20/200 - Loss: 0.174 BER: 0.0219 BMI: 0.920
Iteration 30/200 - Loss: 0.168 BER: 0.0195 BMI: 0.928
Iteration 40/200 - Loss: 0.172 BER: 0.0212 BMI: 0.922
Iteration 50/200 - Loss: 0.169 BER: 0.0195 BMI: 0.927
Iteration 60/200 - Loss: 0.171 BER: 0.0218 BMI: 0.921
Iteration 70/200 - Loss: 0.176 BER: 0.0235 BMI: 0.913
Iteration 80/200 - Loss: 0.168 BER: 0.0192 BMI: 0.930
Iteration 90/200 - Loss: 0.174 BER: 0.0215 BMI: 0.920
Iteration 100/200 - Loss: 0.172 BER: 0.0212 BMI: 0.922
Iteration 110/200 - Loss: 0.171 BER: 0.0208 BMI: 0.923
Iteration 120/200 - Loss: 0.174 BER: 0.0229 BMI: 0.916
Iteration 130/200 - Loss: 0.170 BER: 0.0211 BMI: 0.924
Iteration 140/200 - Loss: 0.173 BER: 0.0219 BMI: 0.920
Iteration 150/200 - Loss: 0.176 BER: 0.0235 BMI: 0.914
Iteration 160/200 - Loss: 0.170 BER: 0.0206 BMI: 0.924
Iteration 170/200 - Loss: 0.173 BER: 0.0224 BMI: 0.918
Iteration 180/200 - Loss: 0.173 BER: 0.0221 BMI: 0.918
Iteration 190/200 - Loss: 0.172 BER: 0.0211 BMI: 0.923
We now simulate the new results and compare it to the untrained results.
[13]:
ebno_dbs = np.array(np.arange(0, 4, 0.25))
batch_size = 1000
mc_iters = 100
ber_plot_5G.simulate(model5G,
ebno_dbs=ebno_dbs,
batch_size=batch_size,
num_target_bit_errors=2000, # stop sim after 2000 bit errors
legend="Trained",
max_mc_iter=mc_iters,
soft_estimates=True,
compile_mode=None);
EbNo [dB] | BER | BLER | bit errors | num bits | block errors | num blocks | runtime [s] | status
---------------------------------------------------------------------------------------------------------------------------------------
0.0 | 1.6711e-01 | 1.0000e+00 | 66844 | 400000 | 1000 | 1000 | 0.1 |reached target bit errors
0.25 | 1.4866e-01 | 1.0000e+00 | 59464 | 400000 | 1000 | 1000 | 0.1 |reached target bit errors
0.5 | 1.2359e-01 | 9.9800e-01 | 49434 | 400000 | 998 | 1000 | 0.1 |reached target bit errors
0.75 | 9.6253e-02 | 9.8100e-01 | 38501 | 400000 | 981 | 1000 | 0.1 |reached target bit errors
1.0 | 6.8867e-02 | 9.4700e-01 | 27547 | 400000 | 947 | 1000 | 0.1 |reached target bit errors
1.25 | 4.0942e-02 | 8.2000e-01 | 16377 | 400000 | 820 | 1000 | 0.1 |reached target bit errors
1.5 | 2.1050e-02 | 5.9200e-01 | 8420 | 400000 | 592 | 1000 | 0.1 |reached target bit errors
1.75 | 8.6850e-03 | 3.6500e-01 | 3474 | 400000 | 365 | 1000 | 0.1 |reached target bit errors
2.0 | 3.2287e-03 | 1.7400e-01 | 2583 | 800000 | 348 | 2000 | 0.2 |reached target bit errors
2.25 | 8.7583e-04 | 6.7500e-02 | 2102 | 2400000 | 405 | 6000 | 0.7 |reached target bit errors
2.5 | 1.9346e-04 | 2.0462e-02 | 2012 | 10400000 | 532 | 26000 | 2.9 |reached target bit errors
2.75 | 3.3075e-05 | 4.5400e-03 | 1323 | 40000000 | 454 | 100000 | 11.2 |reached max iterations
3.0 | 3.5500e-06 | 7.3000e-04 | 142 | 40000000 | 73 | 100000 | 14.6 |reached max iterations
3.25 | 6.5000e-07 | 1.3000e-04 | 26 | 40000000 | 13 | 100000 | 13.0 |reached max iterations
3.5 | 3.2500e-07 | 5.0000e-05 | 13 | 40000000 | 5 | 100000 | 11.9 |reached max iterations
3.75 | 2.5000e-08 | 1.0000e-05 | 1 | 40000000 | 1 | 100000 | 11.3 |reached max iterations
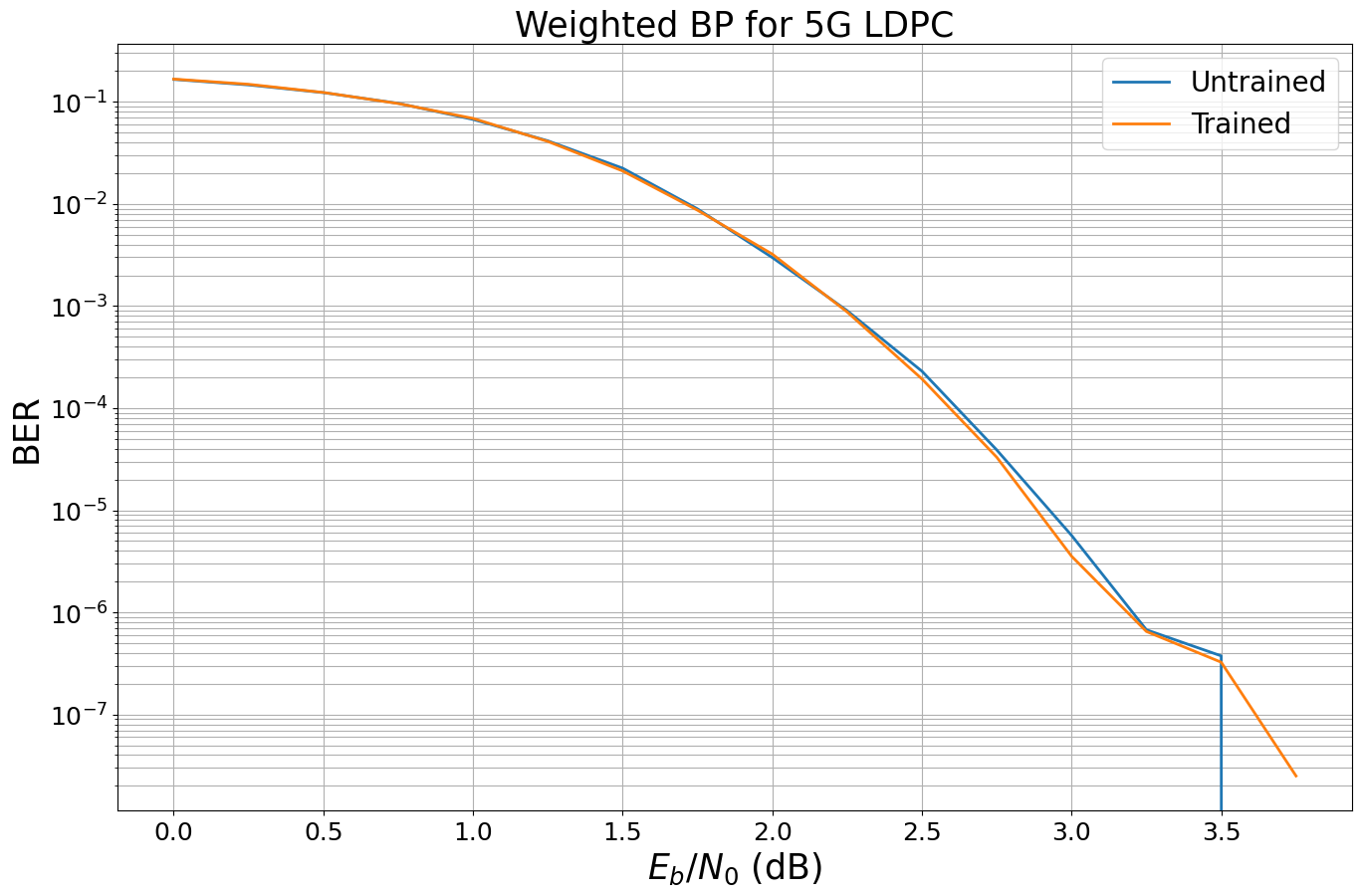
Unfortunately, we observe only very minor gains for the 5G LDPC code. We empirically observed that gain vanishes for more iterations and longer codewords, i.e., for most practical use-cases of the 5G LDPC code the gains are only minor.
However, there may be other codes on graphs that benefit from the principle idea of weighted BP - or other channel setups? Feel free to adjust this notebook and train for your favorite code / channel.
Other ideas for own experiments:
Implement weighted BP with unique weights per iteration.
Apply the concept to (scaled) min-sum decoding as in [5].
Can you replace the complete CN update by a neural network?
Verify the results from all-zero simulations for a real system simulation with explicit encoder and random data
What happens in combination with higher order modulation?
References#
[1] E. Nachmani, Y. Be’ery and D. Burshtein, “Learning to Decode Linear Codes Using Deep Learning,” IEEE Annual Allerton Conference on Communication, Control, and Computing (Allerton), pp. 341-346., 2016. https://arxiv.org/pdf/1607.04793.pdf
[2] M. Lian, C. Häger, and H. Pfister, “What can machine learning teach us about communications?” IEEE Information Theory Workshop (ITW), pp. 1-5. 2018.
[3] ] M. Pretti, “A message passing algorithm with damping,” J. Statist. Mech.: Theory Practice, p. 11008, Nov. 2005.
[4] J.S. Yedidia, W.T. Freeman and Y. Weiss, “Constructing free energy approximations and Generalized Belief Propagation algorithms,” IEEE Transactions on Information Theory, 2005.
[5] E. Nachmani, E. Marciano, L. Lugosch, W. Gross, D. Burshtein and Y. Be’ery, “Deep learning methods for improved decoding of linear codes,” IEEE Journal of Selected Topics in Signal Processing, vol. 12, no. 1, pp.119-131, 2018.