Appendix C Closed-Form Solution for First-Order Diffraction
For first-order diffraction, the position of the diffraction point can be determined in closed form. Consider a source , a target , and an edge defined by its direction . For convenience, we assume the edge passes through the origin of the coordinate system, denoted by .
According to Fermat’s principle, the diffraction point on the edge minimizes the total path length . This corresponds to minimizing the function
| (183) |
where
| (184) |
As shown in [22], is strictly convex and thus has a unique minimizer.
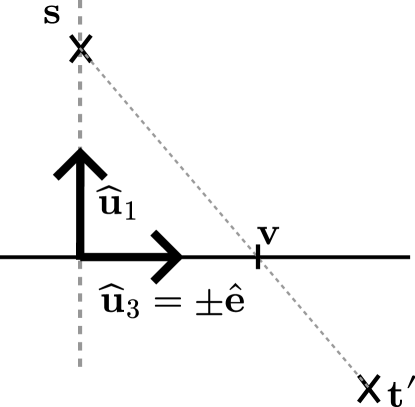
We introduce the set of vectors , where
| (185) | ||||
| (186) | ||||
| (187) |
Note that , and that the source and the edge lie within the plane . A key observation is that rotating the target about the edge does not alter the path length. Specifically, let denote the rotation matrix for an angle around the edge . Then,
| (188) | ||||
| (189) |
holds for any . Especially, by rotating the target around the axis () by the angle
| (191) |
the rotated target is placed in the same plane as the source and the edge, but on the side opposite to the source with respect to the edge, as depicted in Figure 36. The rotation matrix is given by Rodrigues’ rotation formula [30].

Minimizing with the rotated target is equivalent to , , and being collinear, i.e.
| (192) | ||||
| (193) |
where . Since and are parallel, the solution for is
| (194) |