curobo.examples.getting_started.build_robot_model module¶
Build a cuRobo robot configuration from a URDF file.
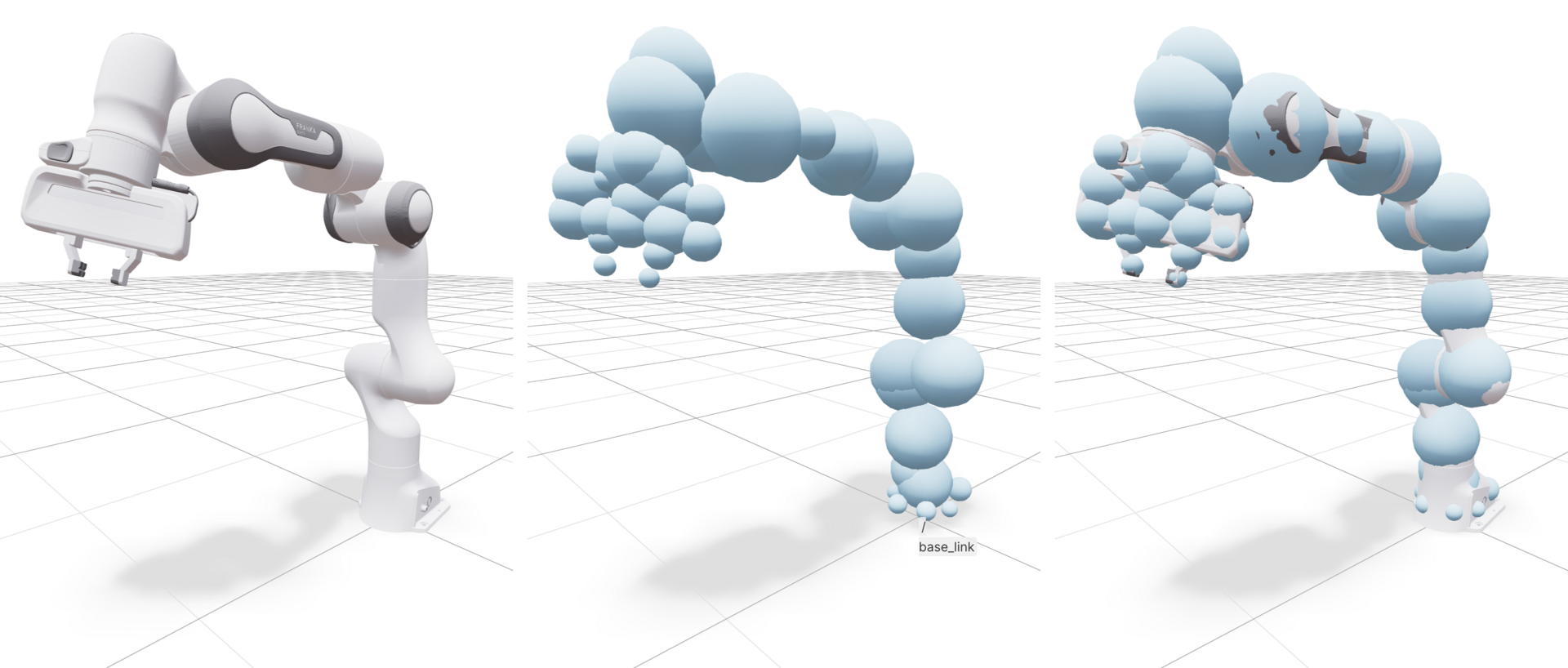
cuRobo needs two pieces of information that a standard URDF does not contain:
collision spheres fitted to each link mesh and a self-collision ignore
matrix that lists link pairs whose collisions can be safely skipped. The
RobotBuilder API generates both and writes them
to a YAML or XRDF config file consumed by every downstream cuRobo module
(forward kinematics, inverse kinematics, motion planning, MPC).
By the end of this tutorial you will have:
Created a cuRobo robot configuration from a URDF file
Fitted collision spheres to each link mesh using the MorphIt optimizer
Computed an optimized self-collision ignore matrix
Inspected per-link sphere fit quality metrics
Visualized the fitted spheres in a browser
Saved the configuration in both YAML and XRDF formats
Step 1: Prepare your URDF¶
You need a URDF file and a directory containing the referenced mesh assets.
cuRobo ships robot URDFs under curobo/content/assets/robot/, so the
tutorial works out of the box with the bundled Franka Panda. For your own
robot, package:// prefixes in mesh filenames are stripped automatically;
set --asset-path to the directory that contains the remaining relative
path (e.g., if the URDF says package://my_robot/meshes/link.stl, point
--asset-path at the parent of my_robot/).
If your robot needs a floating base (e.g., a humanoid whose pelvis moves
freely in space), use extra_links with child_link_name in the YAML config
to insert virtual joints between base_link and the robot’s root body. This
requires no URDF modification. See the
humanoid retargeting guide for a
complete example using the Unitree G1.
Step 2: Run the tutorial¶
python -m curobo.examples.getting_started.build_robot_model \
--urdf curobo/content/assets/robot/franka_description/franka_panda.urdf \
--asset-path curobo/content/assets/robot/franka_description \
--output franka_custom.yml \
--clip-link panda_link0 z 0.0 \
--compute-metrics
Add --visualize to inspect the fitted spheres in a
Viser viewer at http://localhost:8080.
--clip-link panda_link0 z 0.0 keeps the base link’s spheres from
protruding below the mounting surface (see Step 5).
Step 3: Check the output¶
When the tutorial finishes successfully you will see:
Building robot model from URDF: ...franka_panda.urdf
Found 11 links in robot
Fitting collision spheres...
Fitted 87 spheres across 9 links
link n_sph cover% protr% prot_mm gap_mm vol_ratio
---------------------------------------------------------------------------
panda_link0 12 98.3% 4.1% 0.72mm 1.04mm 1.124
...
Computing collision matrix...
Created collision ignore matrix with 28 entries
Saving to: franka_custom.yml
✓ Robot model created successfully!
The generated franka_custom.yml (or .xrdf if you chose that extension)
is ready to use with ik_solver,
motion_gen, or any other cuRobo wrapper.
Step 4: Understand the pipeline¶
The builder runs three stages:
Sphere fitting: Each link mesh is approximated by a set of spheres using the MorphIt optimizer (an Adam-based iterative fit that balances interior coverage against surface protrusion). The
--sphere-densitymultiplier controls how many spheres are allocated per link.Self-collision matrix: Link pairs that are always in collision (e.g. adjacent joints) or never reachable are identified via random joint sampling (
--num-collision-samples) and placed in an ignore set so the downstream planner skips them.Export: The sphere and matrix data, together with the kinematic tree, are serialized to YAML (native cuRobo) or XRDF (Isaac Sim / Isaac Lab). Use
--export-xrdfto emit both formats at once.
Step 5: Tuning (advanced)¶
--coverage-weight/--protrusion-weightcontrol the MorphIt loss balance. Raisecoverage-weight(default 1000) for tighter volume filling; raiseprotrusion-weight(default 10) to reduce overshoot.--sphere-density 2.0doubles the sphere budget per link.--edit-config existing.yml --refit-link panda_handre-fits spheres for a single link without re-running the entire pipeline.--seed 42pins NumPy and PyTorch RNGs for reproducible results.--clip-link base_link z 0.0prevents spheres onbase_linkfrom extending belowz=0in link-local coordinates. This is useful when the robot is mounted on a stand or bolted to the floor – without clipping, the base link spheres may overlap the mounting surface and cause perpetual collisions. The constraint is enforced as both a differentiable MorphIt loss and a hard post-fit clamp. Can be repeated for multiple links.
- build_new_robot(args)¶
Build a new robot model from URDF.
- edit_existing_robot(args)¶
Edit an existing robot configuration.
- test()¶
Run build_robot_model with the bundled Franka URDF as a self-test.
Tests three modes: 1. Build new robot from URDF 2. Edit existing config: refit a single link 3. Edit existing config: add collision ignore + recompute collisions
- main()¶
Main entry point.