Optimization Solvers¶
cuRobo implements a family of optimization solvers that operate on any class satisfying the
Rollout Protocol (see
Rollout Classes) to minimize costs and constraints. Every solver accepts a rollout
that maps [batch, horizon, dof] actions to [batch, horizon] cost, and every solver
itself satisfies the Optimizer Protocol.
There is no shared base class – solvers are standalone classes that compose a small set of
reusable components.
The solvers fall into three broad categories:
Gradient-based solvers (
curobo._src.optim.gradient) – use the rollout’s gradient to take Newton-ish steps with a parallel line search.Particle-based solvers (
curobo._src.optim.particle) – sample actions from a Gaussian distribution and update the distribution from the cost statistics.External solvers (
curobo._src.optim.external) – delegate the outer loop toScipyOpt(SciPy) orTorchOpt(torch.optim) while still evaluating costs and gradients on the GPU through the cuRobo rollout.
Multiple solvers can be chained into a single solve via
MultiStageOptimizer, which itself
implements the Optimizer Protocol (see Chaining Optimization Solvers below).
Optimizer Protocol and the composition of its concrete implementations¶
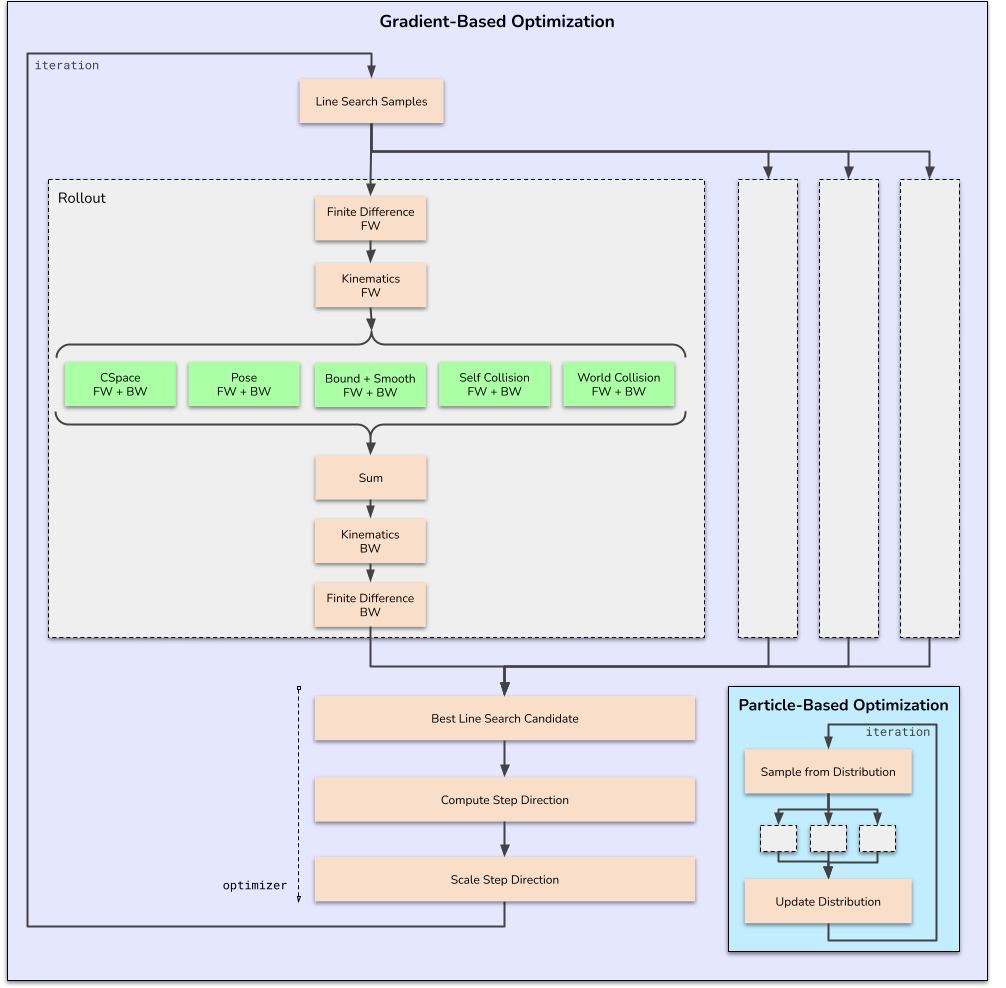
Gradient-Based Optimization Solvers¶
The gradient-based solvers that cuRobo implements use a parallel line search strategy on the GPU to find the minimum instead of a sequential line search strategy (e.g., backtracking line search). At every iteration of a line-search based optimization solver, cuRobo performs the following steps:
Compute the cost and gradient of the current action.
Compute a step direction based on the gradient (and possibly other information).
Perform a line search to find the best step size along the step direction.
Update the action using the step direction and step size.
Repeat until convergence or maximum iterations reached.
The specific implementation details vary depending on the optimization algorithm being used (LBFGS, CG, etc.).
Line Search Optimization¶
Compute the best step magnitude using line search from the current action and step direction (from previous iteration).
Store the best action and gradient.
Compute the new step direction using the gradient of the best action.
Line Search Optimization Iteration¶
Particle-Based Optimization Solvers¶
Particle-based solvers sample a batch of candidate actions from a Gaussian distribution over the action sequence, score each sample with the rollout, and update the distribution from the cost-weighted statistics. cuRobo ships two particle solvers:
MPPI– Model-Predictive Path Integral control. Computes exponential-utility weights (w ∝ exp(-beta * cost)) and takes an exponentially-moving-average step on the distribution mean and covariance. Thebetatemperature is the primary tuning knob for the exploration/exploitation trade-off.EvolutionStrategies– a natural- gradient evolution-strategies solver that uses z-score-normalised cost weights and a configurablelearning_ratefor the mean update.
Both solvers share the same hot loop: they compose a
ParticleOptCore, which owns the
GaussianDistribution,
ActionBounds, and
DebugRecorder, and drives sampling,
rollout evaluation, and weight computation. The solvers differ only in their
distribution-update function; everything else is reused through composition.
External Optimization Solvers¶
External solvers delegate the optimizer loop to a third-party library while still evaluating
costs, constraints, and gradients on the GPU through the cuRobo rollout. Both external solvers
compose ActionBounds (for projecting and
scaling actions) and DebugRecorder (for
optional per-iteration traces).
Scipy Optimization¶
The ScipyOpt solver wraps
scipy.optimize.minimize. On each iteration it:
Computes costs, constraints, and gradients on the GPU via the rollout.
Transfers the scalar cost and gradient to CPU.
Hands control to SciPy (e.g.
L-BFGS-BorSLSQP) to produce the next action.
The method is selected through scipy_minimize_method on
ScipyOptCfg. Constraint-aware methods like
SLSQP automatically receive cuRobo constraints as inequality constraints, and the action is
converted to float64 on CPU for numerical stability.
Torch Optimization¶
The TorchOpt solver wraps any optimizer from
torch.optim (e.g. Adam, SGD, LBFGS). It computes the cost via the rollout,
backpropagates through the computation graph, and delegates the parameter update to the wrapped
PyTorch optimizer. The specific optimizer class is selected by
torch_optim_name (looked up in
torch.optim) or by passing an explicit
torch_optim_class. Unlike the
gradient-based solvers above, TorchOpt does not use cuRobo’s parallel line search – the
wrapped PyTorch optimizer owns the step-size logic.
Chaining Optimization Solvers¶
cuRobo chains solvers through
MultiStageOptimizer, which itself satisfies
the Optimizer Protocol. Each stage runs to
completion and its output is fed as the seed for the next. This is how
curobo.inverse_kinematics.InverseKinematics and
curobo.trajectory_optimizer.TrajectoryOptimizer are wired: a random seed is first
optimized by MPPI for global exploration, and the
resulting distribution mean is handed to
LBFGSOpt for local refinement.
The steps inside the optimization solver is illustrated for reference. Gray blocks indicate running rollout for 1 trajectory in the batch and green blocks refer to the cost terms.