MaskFormer Instance Segmentation¶
This example trains a 3D MaskFormer for point-cloud instance / mask prediction on ScanNet / ScanNet200 using a MinkUNet18 backbone, set-prediction queries, and the standard MaskFormer loss (CE + BCE + Dice) with Hungarian matching.
The class set is configurable via data.label_set:
scannet20(default) — 20 classes; matches the ScanNet instance benchmark and converges faster (smaller class head, smaller Hungarian cost matrix).scannet200— 198 fine-grained classes; same instance task, harder classification supervision, slower convergence.
Both share the same instance-mask supervision — only the per-mask
classification head differs in size. Pick scannet20 when you want to
sanity-check the training scaffold; switch to scannet200 for the more
granular benchmark.
The training script lives at
examples/train/maskformer.py.
Dataset¶
The script consumes the Mask3D-style preprocessed ScanNet layout. The raw meshes are gated by the ScanNet Terms of Use; once you have access, run either preprocessing pipeline:
The expected on-disk layout:
<root>/
train/
sceneXXXX_YY/
coord.npy # (N, 3) float32
color.npy # (N, 3) uint8 or float32
normal.npy # (N, 3) float32
segment20.npy # (N,) int32 (-1 = ignore)
segment200.npy # (N,) int32 (-1 = ignore)
instance.npy # (N,) int32 (-1 = ignore)
val/...
test/...This is what
warpconvnet.dataset.scannet.ScanNetInstanceDataset
reads. It exposes both scannet20 (20 classes) and scannet200 (200
classes) label sets.
Architecture¶
Points
└── PointToVoxel(voxel_size=model.backbone_voxel_size)
└── <model.backbone._target_>(in_channels=3, out_channels=hidden_dim)
↓ per-point feature embeddings
├── mask_features_head(hidden_dim → hidden_dim)
└── MaskTransformer(num_queries, num_decoders, num_heads)
↓ queries (B, num_queries, hidden_dim)
├── class_head → logits (B, num_queries, num_classes+1)
└── mask_inner_product(queries, mask_features)
→ masks: list of (num_queries, N_b)- Backbone — any per-point feature encoder, instantiated from
model.backbone._target_via Hydra (defaultMinkUNet18). Wrapped byPointToVoxelwhenmodel.backbone_voxel_sizeis set, so the module can consumePointsdirectly. - Mask transformer —
num_decodersrounds of (self-attention over queries) → (cross-attention over scene features) → (FFN). - Heads — class logits per query (
+1for "no object" / background), and per-point binary mask logits viaqueries · mask_features.
Loss¶
For each scene we run Hungarian matching between predicted queries and ground-truth instances using a weighted cost combining:
−softmax(cls_logit)[t](class probability under target label),- per-point
binary_cross_entropy_with_logits(pred_mask, target_mask), 1 − DICE(pred_mask, target_mask).
scipy.optimize.linear_sum_assignment solves the assignment. The training
loss is the sum of:
| Term | Formula | Default weight |
|---|---|---|
| Class CE | cross_entropy(logits, matched_labels) |
1.0 |
| Mask BCE | BCE(pred_logits, target_mask) (matched) |
5.0 |
| Dice | 1 − dice(pred_logits, target_mask) |
5.0 |
Unmatched queries are supervised toward the "no object" class. Its CE
contribution is down-weighted (no_object_weight: 0.1) to balance the
heavy negative-query majority — this matches the original Mask2Former
recipe.
Stuff classes
The standard ScanNet instance benchmark drops wall (class 0) and
floor (class 1) from instance evaluation — only "thing" classes
contribute to mAP. The example's build_targets does not filter
these out; every connected instance with a valid semantic label is
supervised. To match the leaderboard convention, drop instances whose
mode class falls in your stuff list before stacking targets.
Run¶
pip install "warpconvnet[models]" scipy
python examples/train/maskformer.py \
paths.data_dir=/path/to/scannet_preprocessed \
train.batch_size=2 \
train.lr=1e-4
# Switch to the 200-class label set:
python examples/train/maskformer.py data.label_set=scannet200The script is Hydra-driven; override any field on the CLI:
# Smaller / lighter run for a sanity check
python examples/train/maskformer.py \
train.epochs=1 \
train.num_workers=0 \
data.voxel_size=0.05 \
model.backbone_voxel_size=0.05 \
model.num_decoders=2 \
model.dim_feedforward=128
# 200-class variant (scannet200)
python examples/train/maskformer.py data.label_set=scannet200
# Swap the backbone — any class importable from warpconvnet.models works.
# `model.hidden_dim` and `model.backbone.out_channels` must match.
python examples/train/maskformer.py \
model.backbone._target_=warpconvnet.models.MinkUNet34
python examples/train/maskformer.py \
model.hidden_dim=128 \
model.backbone._target_=warpconvnet.models.MinkUNet50 \
model.backbone.out_channels=128
# SpaCeFormer backbone (curve+space attention U-Net). The +-prefixed keys
# add SpaCeFormer-specific args that MinkUNet does not have.
python examples/train/maskformer.py \
model.backbone._target_=warpconvnet.models.SpaCeFormer \
+model.backbone.enc_attn_types=ssccc \
+model.backbone.dec_attn_types=ssca \
+model.backbone.use_rope=true
# Grid search Dice / BCE / no-object weights
python examples/train/maskformer.py \
loss.bce_weight=2.0 loss.dice_weight=2.0 loss.no_object_weight=0.05Backbone swap¶
The backbone is instantiated via Hydra's _target_. Any module that
returns per-point features is valid; the example wraps the module with
PointToVoxel(voxel_size=model.backbone_voxel_size) so it can
consume Points directly. Set model.backbone_voxel_size=null for a
backbone that already operates on Points (e.g. point-based encoders) —
the wrapper will be skipped.
Two constraints:
model.backbone.out_channels(or whatever the chosen module names its output width) must equalmodel.hidden_dimso the mask transformer's query width and the per-point feature width agree.- The first layer must accept
model.backbone.in_channels=3(RGB) — or override and feed extra features.
Live viewer¶
Toggle the viser viewer to inspect predictions vs. ground-truth instance masks side-by-side while training:
pip install viser trimesh
python examples/train/maskformer.py \
viz.enabled=true \
viz.port=8080 \
viz.interval_seconds=10.0 \
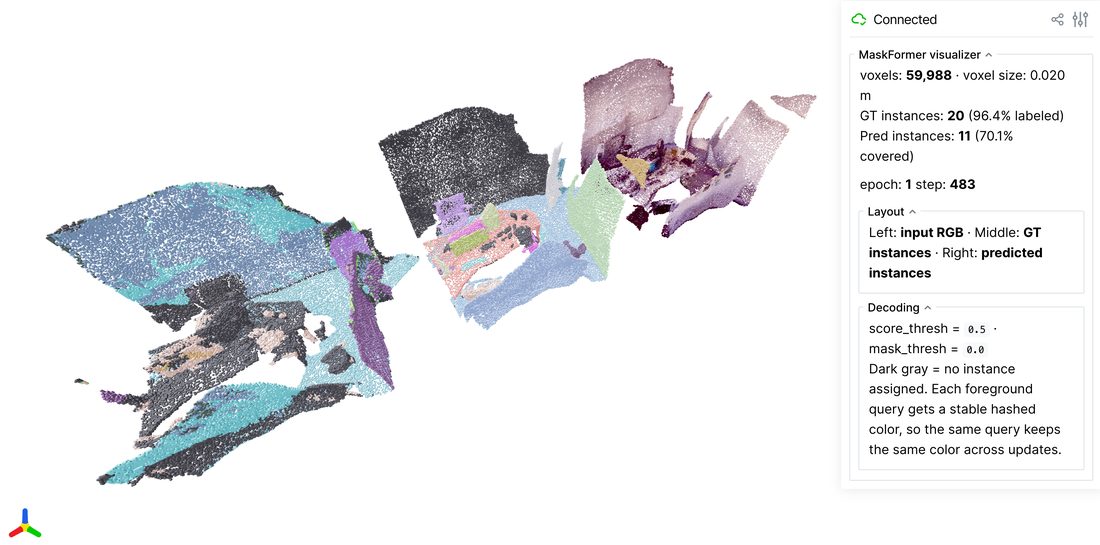
viz.voxel_size=0.04Open http://localhost:8080 in a browser. Three voxel panels render
side-by-side and refresh every viz.interval_seconds:
| Panel | Content |
|---|---|
| Left | Input voxel RGB |
| Middle | Ground-truth instance ids (hash-colored; dark gray = no instance) |
| Right | Predicted instance ids decoded from the MaskFormer query outputs |
Decoding for the prediction panel: each query is filtered by
viz.score_thresh (min foreground class probability), then per-point the
highest-scoring kept query above viz.mask_thresh wins. Tighten
score_thresh to suppress under-confident queries; loosen mask_thresh
(e.g. -2.0) early in training when mask logits are still small.
The viewer is throttled — refreshes happen at most once per
interval_seconds, so leaving it on adds negligible overhead to training.
Configuration reference¶
Paths
| Key | Default | Description |
|---|---|---|
paths.data_dir |
/path/to/scannet_preprocessed |
Root containing train/, val/, test/ |
paths.output_dir |
./results/maskformer |
Output dir for checkpoints / logs |
Training
| Key | Default | Description |
|---|---|---|
train.batch_size |
2 |
Scenes per step |
train.lr |
1e-4 |
AdamW learning rate |
train.epochs |
100 |
Total epochs |
train.step_size |
25 |
StepLR period |
train.gamma |
0.5 |
StepLR decay |
train.num_workers |
4 |
DataLoader workers |
train.log_every |
20 |
Steps between progress-bar updates |
Data
| Key | Default | Description |
|---|---|---|
data.label_set |
scannet20 |
scannet20 or scannet200 |
data.voxel_size |
0.04 |
Pre-loader voxel downsample (m) |
data.ignore_index |
-1 |
Ignore label for segment / instance |
Model
| Key | Default | Description |
|---|---|---|
model.hidden_dim |
96 |
Mask transformer / decoder width (must match the backbone output) |
model.num_queries |
100 |
Set-prediction query count |
model.num_heads |
8 |
Attention heads in decoder |
model.num_decoders |
6 |
Transformer decoder layers |
model.dim_feedforward |
256 |
FFN hidden width |
model.dropout |
0.1 |
Decoder dropout |
model.backbone_voxel_size |
0.04 |
Voxel size for PointToVoxel; null disables the wrapper |
model.backbone._target_ |
warpconvnet.models.MinkUNet18 |
Hydra target for the backbone — any per-point feature encoder |
model.backbone.in_channels |
3 |
Backbone input channels (RGB by default) |
model.backbone.out_channels |
96 |
Backbone output channels — must equal model.hidden_dim |
Loss
| Key | Default | Description |
|---|---|---|
loss.cls_weight |
1.0 |
Cross-entropy weight |
loss.bce_weight |
5.0 |
Mask BCE weight |
loss.dice_weight |
5.0 |
Dice weight |
loss.no_object_weight |
0.1 |
CE weight for the "no object" class |
Visualization
| Key | Default | Description |
|---|---|---|
viz.enabled |
false |
Toggle the live viser viewer |
viz.port |
8080 |
HTTP port for the viser server |
viz.interval_seconds |
10.0 |
Min seconds between refreshes |
viz.voxel_size |
0.04 |
Display voxel size (independent of training voxel) |
viz.score_thresh |
0.5 |
Min foreground class prob to keep a query in the prediction panel |
viz.mask_thresh |
0.0 |
Min mask logit to assign a point to a query |
What to expect¶
A first-iteration smoke test on a 4 cm-voxelized ScanNet val subset
(B=2, MinkUNet18 backbone, 100 queries) shows the loss decreasing
across the very first steps — the optimizer + matcher pipeline is wired
correctly out of the box. Real mAP@50 numbers require longer runs and
the standard augmentations from the Mask3D recipe; this script is the
minimal training scaffold, not a leaderboard-tuned setup.