SpaCeFormer¶
Created: 2026-05-05 13:10:00 PST Edited: 2026-05-05 14:05:00 PST
warpconvnet.models.SpaCeFormer is a hierarchical sparse-voxel U-Net whose
attention blocks alternate between two flavors of attention: serialized 1D
attention along a space-filling curve, and 3D window-grouped
attention. The name follows the paper's "space-curve" etymology.
Choy, Lee, Park, Cho, Kautz. SpaCeFormer: Fast Proposal-Free Open-Vocabulary 3D Instance Segmentation. 2026. Project page
Attention flavors¶
Each encoder/decoder level picks one of three attention types:
| key | class | what it does |
|---|---|---|
curve |
PatchAttention (warpconvnet.nn.modules.attention) |
sort voxels along a space-filling curve, attend within fixed-length 1D patches |
space |
SpaceAttention (warpconvnet.nn.modules.space_attention) |
group voxels into 3D windows of size window_size, attend within each window |
all |
AllAttention (subclass of SpaceAttention with window_size="all") |
full-sequence attention across the level (no window grouping) |
Compared to other transformer blocks for vision/3D, the SpaCeFormer block keeps the sparse-conv shortcut and uses a fused QKV + RoPE path:
| ViT | CvT | PointTransformer | SpaCeFormer |
|---|---|---|---|
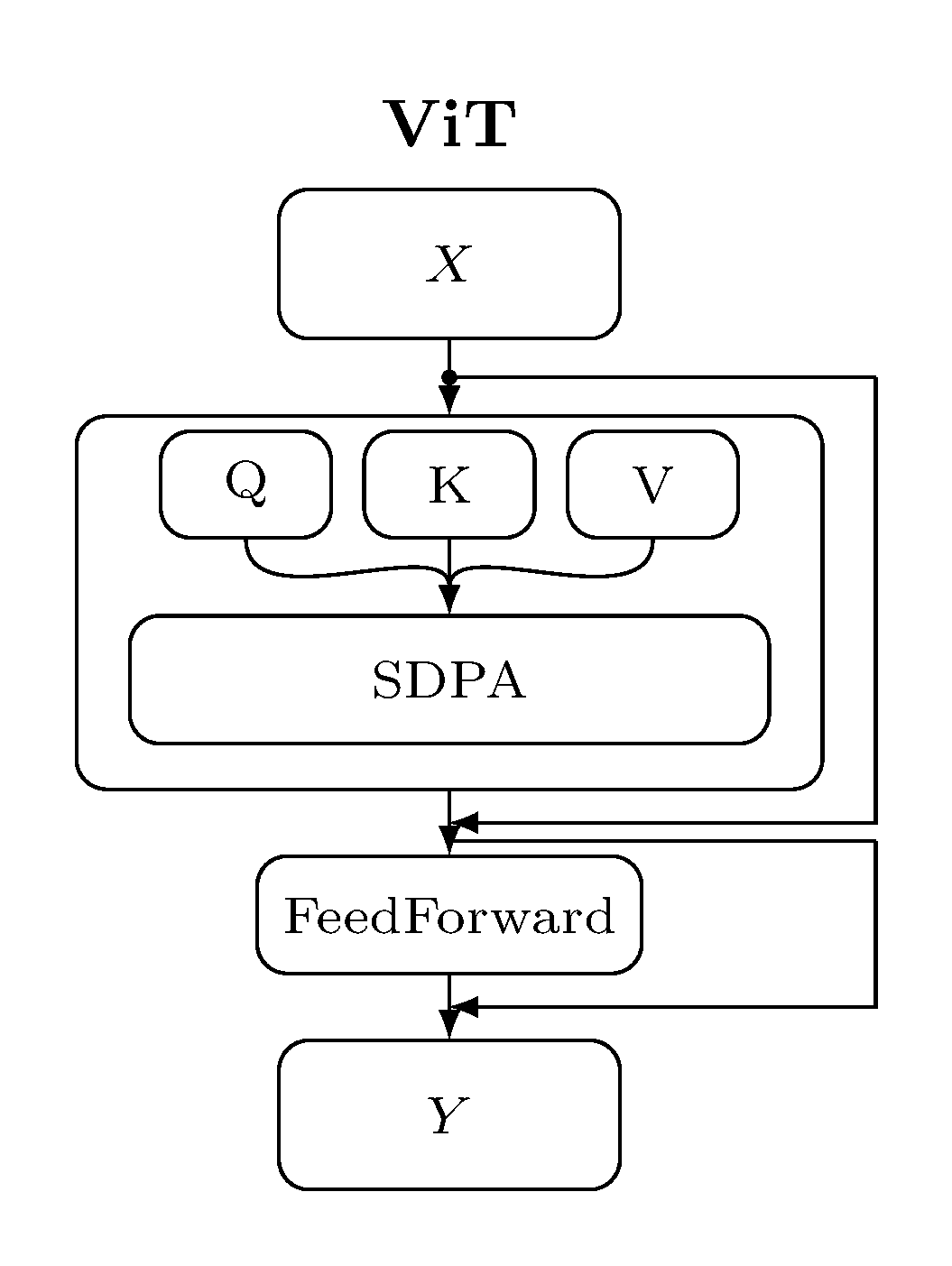 |
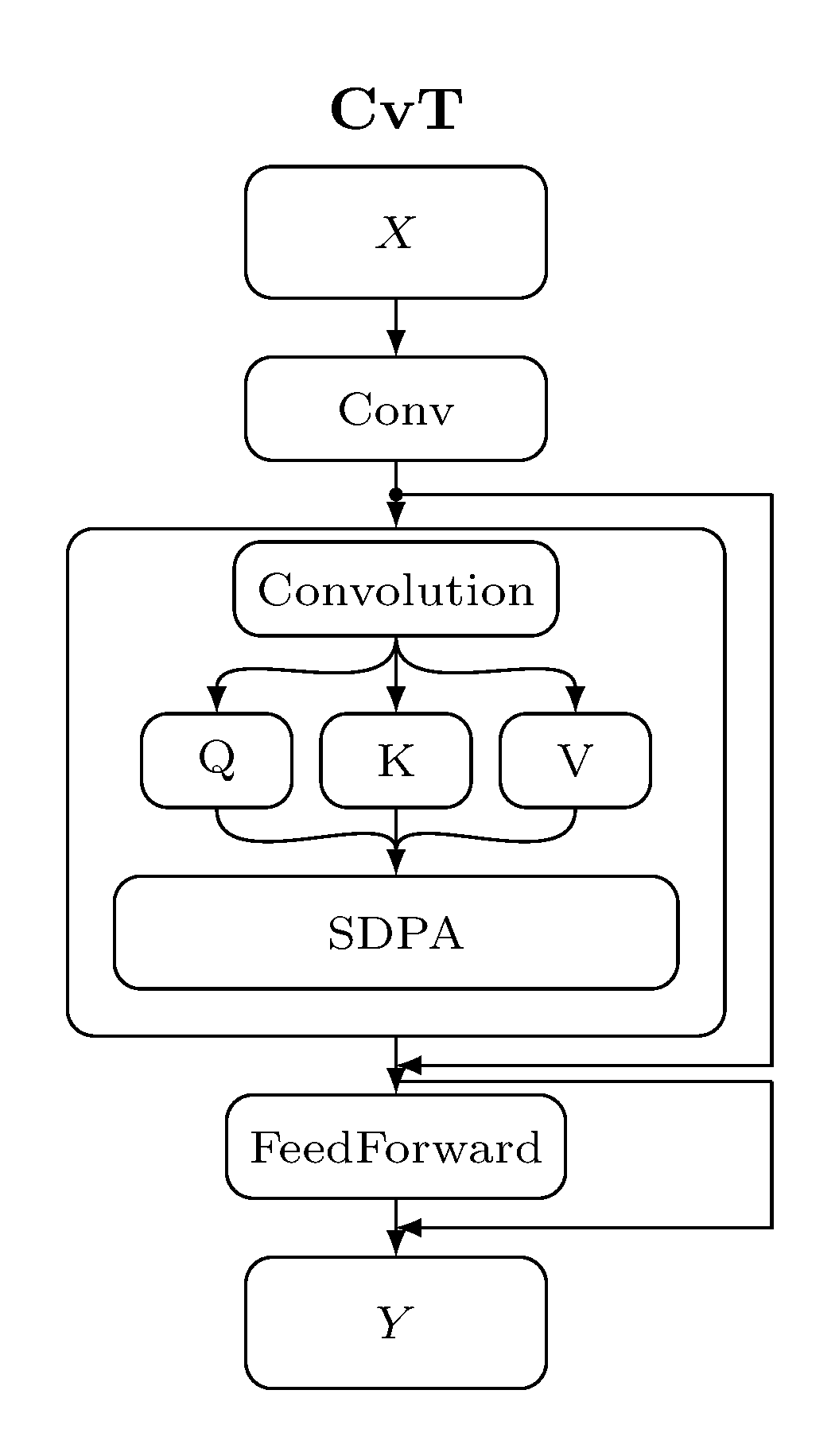 |
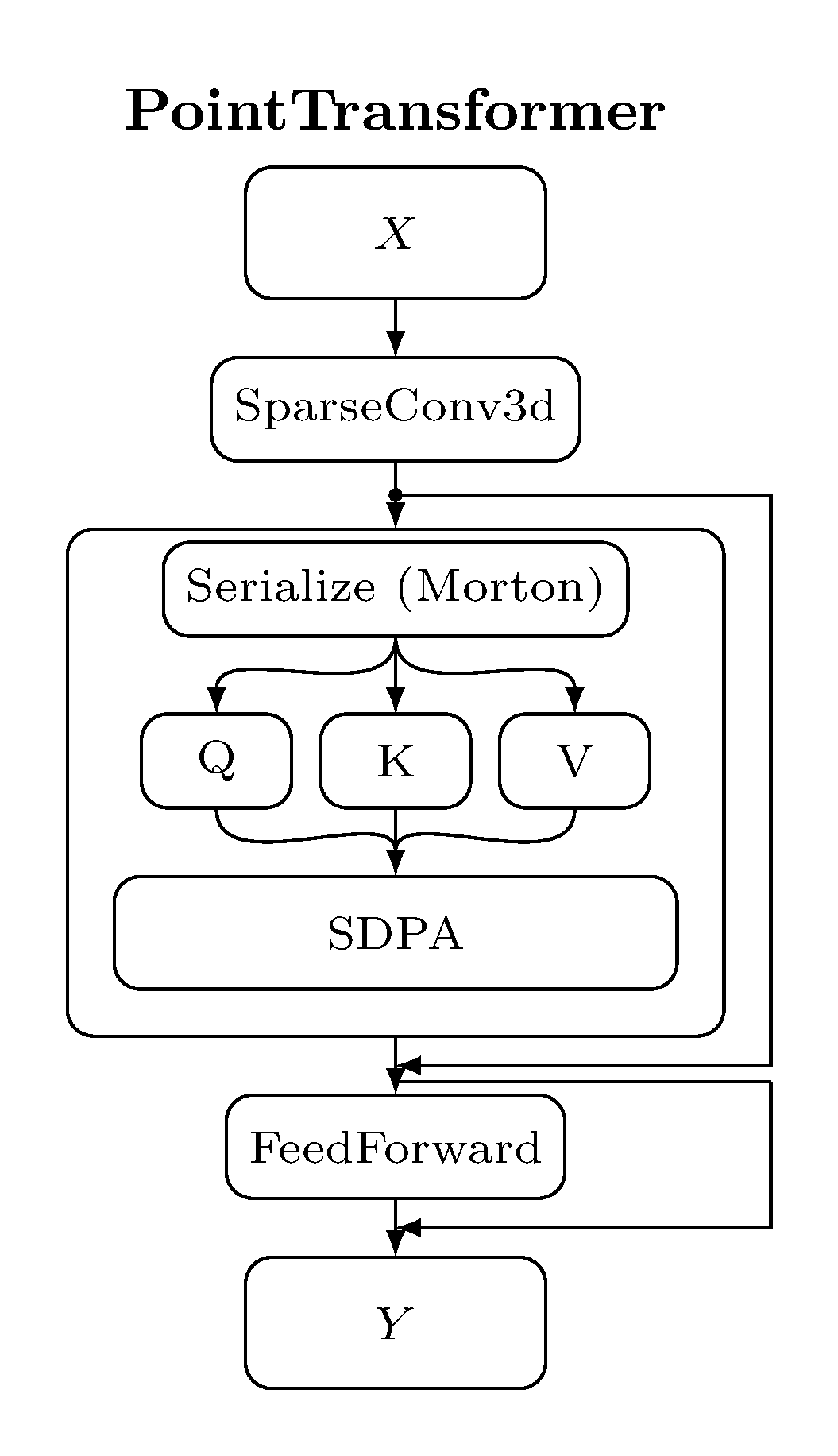 |
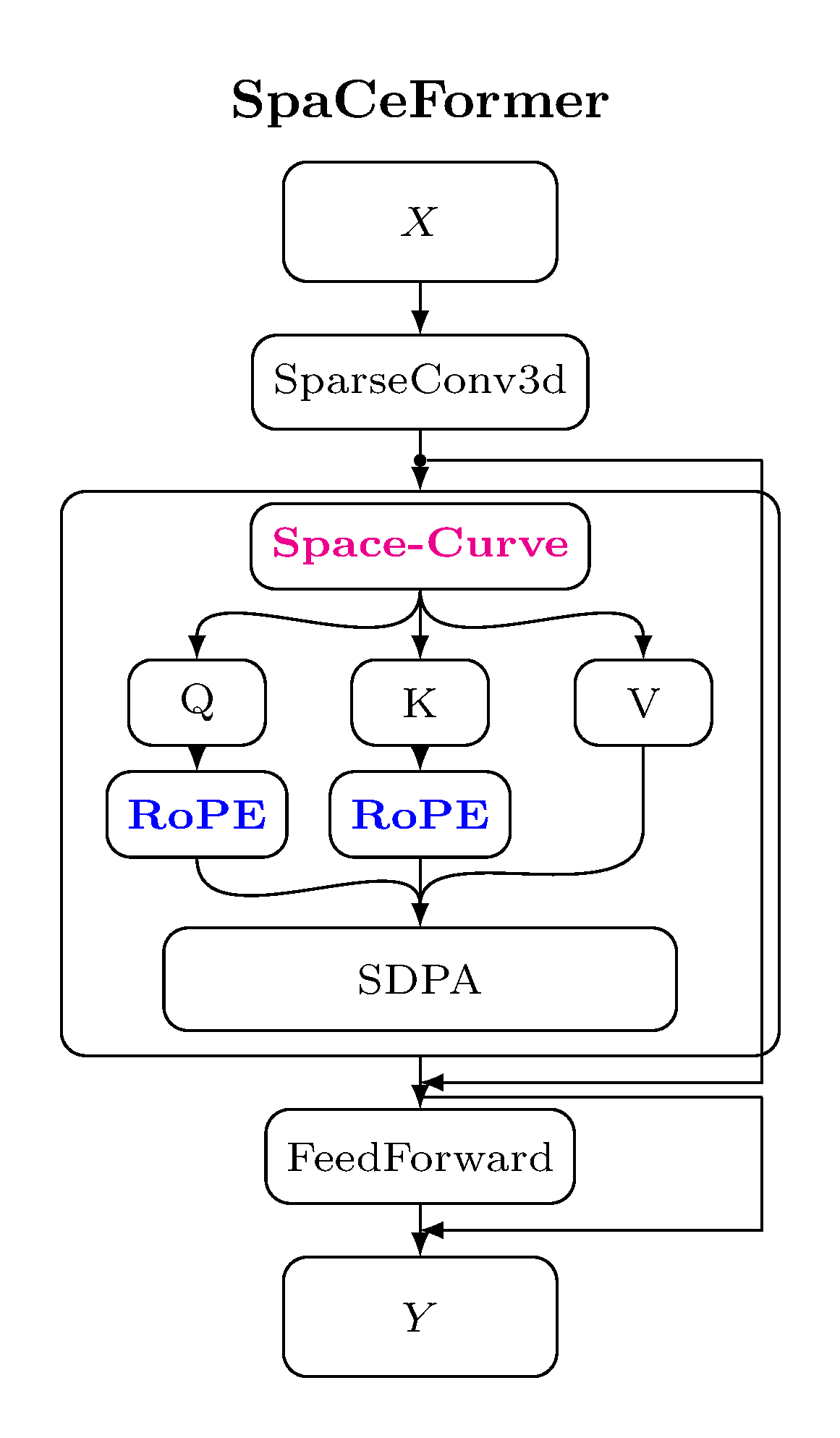 |
The block follows the modern transformer recipe — sparse-conv shortcut,
attention sublayer, feed-forward sublayer — with three norm-residual layouts
to choose from (pre_norm, post_norm, stream_norm). See
Block layout below.
Why curve + space?¶
The two flavors are complementary, but they make different bargains with locality.
Fixed sequence length vs. fixed spatial extent. Curve attention sorts
voxels along a space-filling curve (Morton / Hilbert / etc.) and chops the
sequence into fixed-length patches of patch_size voxels. Two voxels that
are spatial neighbors but happen to straddle a chunk boundary end up in
different attention sets — locality is broken whenever the curve takes a
long jump. Space attention does the opposite: it bins voxels into 3D
windows of a fixed metric extent (window_size). Each window holds a
variable number of voxels but is guaranteed to contain only spatially
close ones; nothing local is split.
The paper (Sec. 4.3) measures this directly: averaged over a level, the mean pairwise distance between voxels in the same attention window is ~28.6% smaller for space attention than for Morton-curve attention. Lower intra-window distance ⇒ stronger preservation of local geometric structure.
Rule of thumb: use space at the lower (shallow, high-resolution)
levels and curve at the higher (deep, low-resolution) levels. At
shallow stages each voxel covers a small physical region, so the locality
penalty of curve attention hurts; the fixed-extent windows of space
keep neighbors together. At deep stages voxels are coarse and the
receptive field is already large; curve attention's long-range
serialization is the cheaper way to move information.
Block layout¶
Three norm-residual layouts are exposed via block_type:
| name | math |
|---|---|
pre_norm (default, modern transformer convention) |
x + sublayer(norm(x)) |
post_norm |
attn(x) + x; norm; mlp(x) + x; norm |
stream_norm (paper's choice, residual stream stays normalized) |
norm(x); sublayer(x) + x; norm(x); ... |
All three live in warpconvnet.nn.modules.space_attention and are reusable
in other transformer-based backbones via block_factory(name) /
BLOCK_REGISTRY.
RoPE¶
Q/K rotation uses a 3D voxel-coordinate RoPE
(VoxelRotaryPositionalEmbeddings). The kernel is fused: a single CUDA pass
loads QKV [M, 3, C], applies the rotation to the first
(head_dim // 6) * 6 dimensions of Q and K, and writes [M, 3, num_heads, head_dim] ready for flash_attn_varlen_qkvpacked.
Use warpconvnet.nn.modules.rope.suggest_voxel_rope_base to pick a
window-aware base. For a level with window size L voxels, the
default scaled_window strategy returns ≈4·L clamped to a power of two.
Signature¶
class SpaCeFormer(BaseSpatialModel):
def __init__(
self,
in_channels: int = 6,
enc_depths: Tuple[int, ...] = (2, 2, 2, 6, 2),
enc_channels: Tuple[int, ...] = (32, 64, 128, 256, 512),
enc_num_head: Tuple[int, ...] = (2, 4, 8, 16, 32),
enc_patch_size: Tuple[int, ...] = (1024,) * 5,
enc_attn_types: str | List[str] = "curve", # 'c'/'s'/'a' compact code OK
dec_depths: Tuple[int, ...] = (2, 2, 2, 2),
dec_channels: Tuple[int, ...] = (64, 64, 128, 256),
dec_num_head: Tuple[int, ...] = (4, 4, 8, 16),
dec_patch_size: Tuple[int, ...] = (1024,) * 4,
dec_attn_types: str | List[str] = "curve",
block_type: Literal["pre_norm", "post_norm", "stream_norm"] = "pre_norm",
use_rope: bool = False,
rope_base: int | None = None, # overrides per-level lists
enc_rope_bases: Tuple[int, ...] = (250,) * 5,
dec_rope_bases: Tuple[int, ...] = (250,) * 4,
out_channels: int | None = None,
use_checkpoint: bool = False,
# ... see source for full signature
): ...
def forward(self, x: Voxels) -> Voxels: ...enc_attn_types and dec_attn_types accept three forms:
- a single string (
"curve"/"space"/"all") — broadcast to all levels. - a compact code (
"ccssa"for 5 levels) — one character per level via{"c": "curve", "s": "space", "a": "all"}. - an explicit list of attention names.
Usage¶
import torch
from warpconvnet.geometry.types.points import Points
from warpconvnet.geometry.types.conversion.to_voxels import points_to_voxels
from warpconvnet.models import SpaCeFormer
device = "cuda"
# A toy point cloud.
B, C = 2, 6
coords = [torch.rand(8000, 3) for _ in range(B)]
features = [torch.rand(8000, C) for _ in range(B)]
pc = Points(coords, features).to(device)
voxels = points_to_voxels(pc, voxel_size=0.02)
model = SpaCeFormer(
in_channels=C,
enc_depths=(2, 2, 2, 6, 2),
enc_channels=(32, 64, 128, 256, 512),
enc_num_head=(2, 4, 8, 16, 32),
enc_patch_size=(32, 32, 1024, 1024, 1024),
enc_attn_types="ssccc", # space at shallow levels, curve deeper
dec_depths=(2, 2, 2, 2),
dec_channels=(64, 64, 128, 256),
dec_num_head=(4, 4, 8, 16),
dec_patch_size=(32, 32, 1024, 1024),
dec_attn_types="ssca", # space at shallow, curve deeper, 'all' at the bottleneck
block_type="pre_norm",
use_rope=True,
out_channels=20,
).to(device)
out = model(voxels) # Voxels with .feature_tensor of shape (M, 20)Gradient checkpointing¶
Each SpaCeFormer attention/FFN block is a checkpoint boundary. Enable all encoder and decoder blocks either through the constructor or at runtime:
model = SpaCeFormer(
in_channels=C,
out_channels=20,
use_checkpoint=True,
).to(device)
# Equivalent runtime control:
model.gradient_checkpointing_disable()
model.gradient_checkpointing_enable()Checkpointing is used only during gradient-enabled training. See Gradient Checkpointing for Hugging Face Trainer integration, recomputation behavior, and validation guidance.
Pipeline¶
The backbone produces dense per-voxel features. For instance/mask
prediction, plug it into MaskFormer:
from warpconvnet.models import MaskFormer
from warpconvnet.nn.modules.sparse_pool import PointToVoxel
backbone = PointToVoxel(
inner_module=SpaCeFormer(in_channels=3, out_channels=96, ...),
voxel_size=0.04,
concat_unpooled_pc=False,
)
model = MaskFormer(backbone=backbone, hidden_dim=96, ...)See MaskFormer for the head and ScanNet for the dataset wiring.
Reference¶
- Choy, Lee, Park, Cho, Kautz. SpaCeFormer: Fast Proposal-Free Open-Vocabulary 3D Instance Segmentation. 2026.
- Project page — qualitative results, paper PDF.
- Author blog post — design notes on the curve/space mix and RoPE decoder.