Ray Tracing
This module provides a differentiable ray tracer for radio propagation modeling. The best way to get started is by having a look at the Sionna Ray Tracing Tutorial. The Primer on Electromagnetics provides useful background knowledge and various definitions that are used throughout the API documentation.
The most important component of the ray tracer is the Scene.
It has methods for the computation of propagation Paths (compute_paths()) and CoverageMap (coverage_map()).
Sionna has several integrated Example Scenes that you can use for your own experiments. In this video, we explain how you can create your own scenes using OpenStreetMap and Blender.
You can preview a scene within a Jupyter notebook (preview()) or render it to a file from the viewpoint of a camera (render() or render_to_file()).
Propagation Paths can be transformed into time-varying channel impulse responses (CIRs) via cir(). The CIRs can then be used for link-level simulations in Sionna via the functions cir_to_time_channel() or cir_to_ofdm_channel(). Alternatively, you can create a dataset of CIRs that can be used by a channel model with the help of CIRDataset.
The paper Sionna RT: Differentiable Ray Tracing for Radio Propagation Modeling shows how differentiable ray tracing can be used for various optimization tasks. The related notebooks can be a good starting point for your own experiments.
Scene
The scene contains everything that is needed for radio propagation simulation and rendering.
A scene is a collection of multiple instances of SceneObject which define
the geometry and materials of the objects in the scene.
The scene also includes transmitters (Transmitter) and receivers (Receiver)
for which propagation Paths or channel impulse responses (CIRs) can be computed,
as well as cameras (Camera) for rendering.
A scene is loaded from a file using the load_scene() function.
Sionna contains a few Example Scenes.
The following code snippet shows how to load one of them and
render it through the lens of the preconfigured scene Camera “scene-cam-0”:
scene = load_scene(sionna.rt.scene.munich)
scene.render(camera="scene-cam-0")
You can preview a scene in an interactive 3D viewer within a Jupyter notebook using preview():
scene.preview()
In the code snippet above, the load_scene() function returns the Scene instance which can be used
to access scene objects, transmitters, receivers, cameras, and to set the
frequency for radio wave propagation simulation. Note that you can load only a single scene at a time.
It is important to understand that all transmitters in a scene share the same AntennaArray which can be set
through the scene property tx_array. The same holds for all receivers whose AntennaArray
can be set through rx_array. However, each transmitter and receiver can have a different position and orientation.
The code snippet below shows how to configure the tx_array and rx_array and
to instantiate a transmitter and receiver.
# Configure antenna array for all transmitters
scene.tx_array = PlanarArray(num_rows=8,
num_cols=2,
vertical_spacing=0.7,
horizontal_spacing=0.5,
pattern="tr38901",
polarization="VH")
# Configure antenna array for all receivers
scene.rx_array = PlanarArray(num_rows=1,
num_cols=1,
vertical_spacing=0.5,
horizontal_spacing=0.5,
pattern="dipole",
polarization="cross")
# Create transmitter
tx = Transmitter(name="tx",
position=[8.5,21,27],
orientation=[0,0,0])
scene.add(tx)
# Create a receiver
rx = Receiver(name="rx",
position=[45,90,1.5],
orientation=[0,0,0])
scene.add(rx)
# TX points towards RX
tx.look_at(rx)
print(scene.transmitters)
print(scene.receivers)
{'tx': <sionna.rt.transmitter.Transmitter object at 0x7f83d0555d30>}
{'rx': <sionna.rt.receiver.Receiver object at 0x7f81f00ef0a0>}
Once you have loaded a scene and configured transmitters and receivers, you can use the scene method
compute_paths() to compute propagation paths:
paths = scene.compute_paths()
The output of this function is an instance of Paths and can be used to compute channel
impulse responses (CIRs) using the method cir().
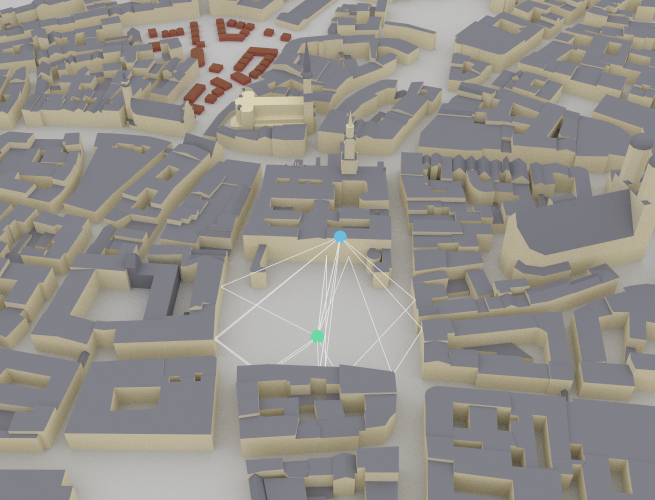
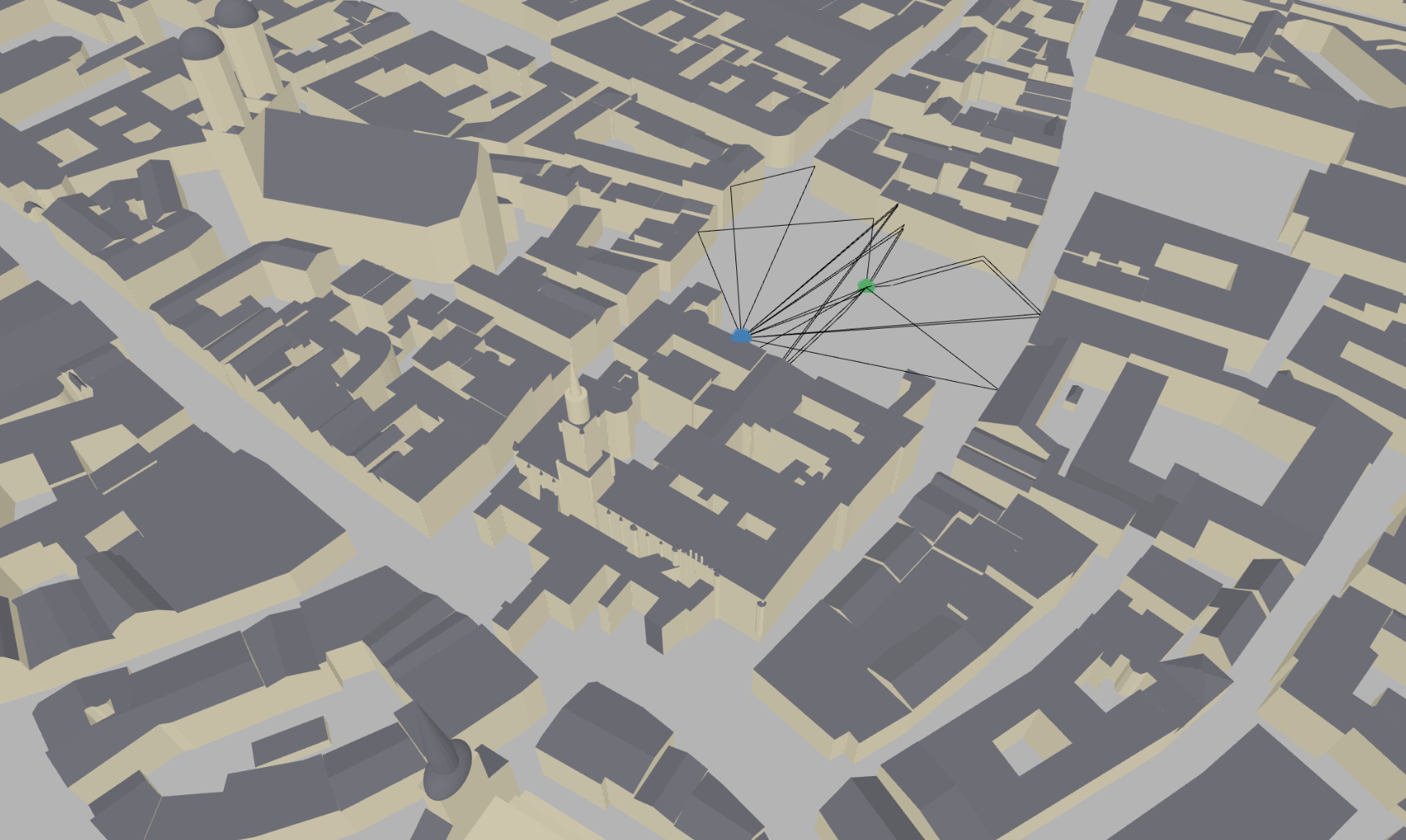
You can visualize the paths within a scene by one of the following commands:
scene.preview(paths=paths) # Open preview showing paths
scene.render(camera="preview", paths=paths) # Render scene with paths from preview camera
scene.render_to_file(camera="preview",
filename="scene.png",
paths=paths) # Render scene with paths to file
Note that the calls to the render functions in the code above use the “preview” camera which is configured through
preview(). You can use any other Camera that you create here as well.
The function coverage_map() computes a CoverageMap for every transmitter in a scene:
cm = scene.coverage_map(cm_cell_size=[1.,1.], # Configure size of each cell
num_samples=1e7) # Number of rays to trace
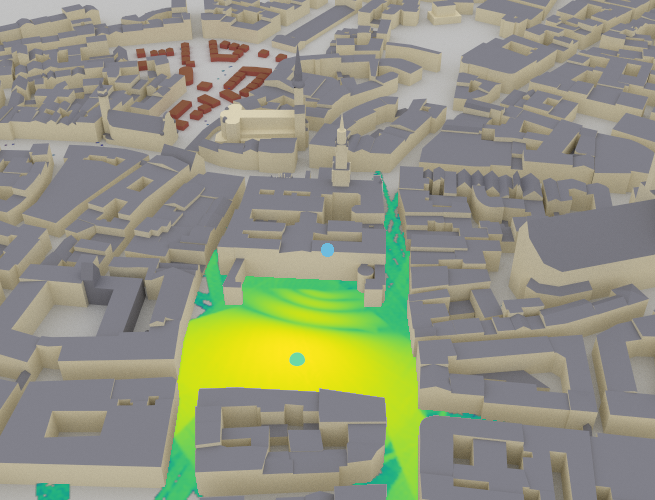
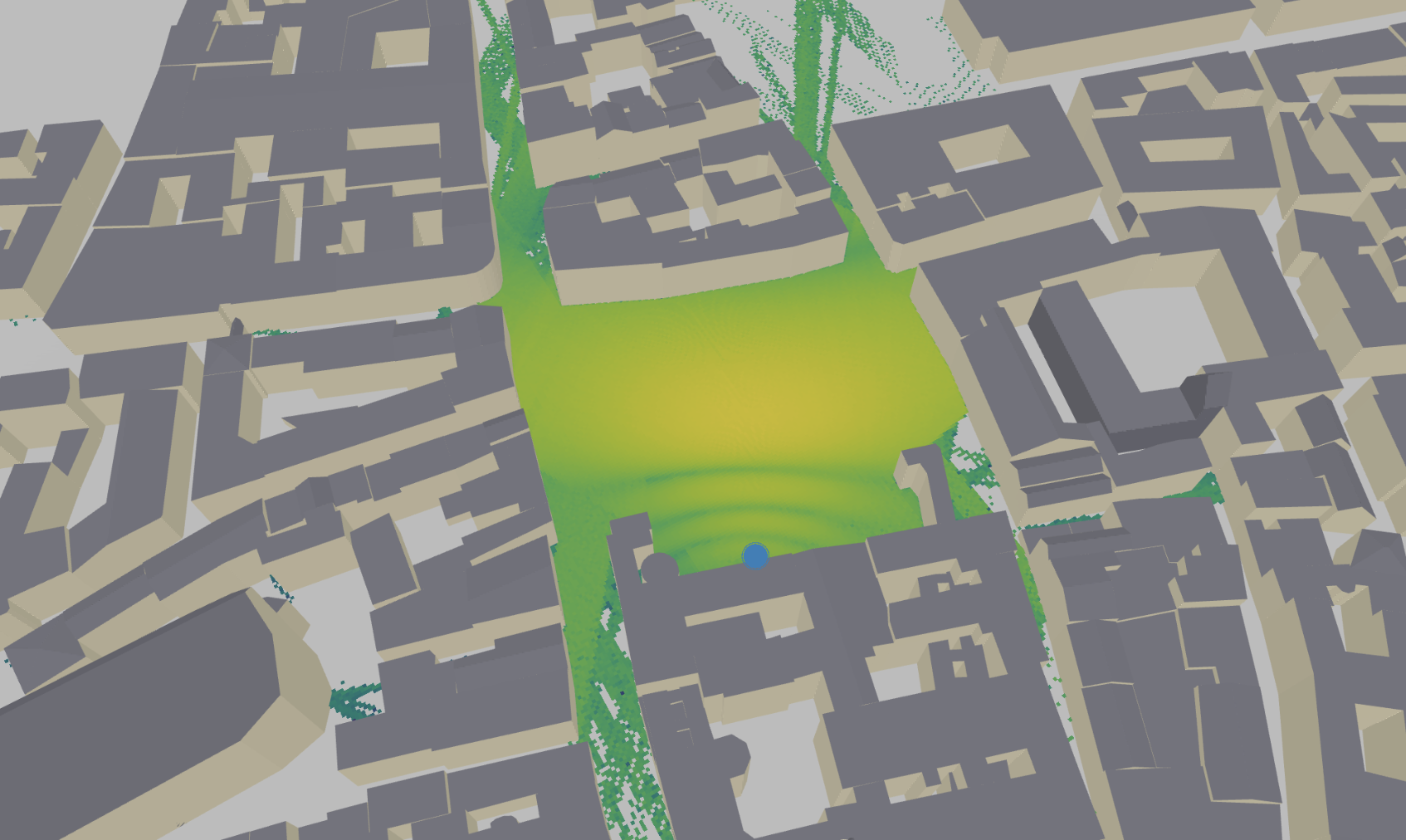
Coverage maps can be visualized in the same way as propagation paths:
scene.preview(coverage_map=cm) # Open preview showing coverage map
scene.render(camera="preview", coverage_map=cm) # Render scene with coverage map
scene.render_to_file(camera="preview",
filename="scene.png",
coverage_map=cm) # Render scene with coverage map to file
Scene
- class sionna.rt.Scene[source]
The scene contains everything that is needed for radio propagation simulation and rendering.
A scene is a collection of multiple instances of
SceneObjectwhich define the geometry and materials of the objects in the scene. The scene also includes transmitters (Transmitter) and receivers (Receiver) for which propagationPaths, channel impulse responses (CIRs) or coverage maps (CoverageMap) can be computed, as well as cameras (Camera) for rendering.The only way to instantiate a scene is by calling
load_scene(). Note that only a single scene can be loaded at a time.Example scenes can be loaded as follows:
scene = load_scene(sionna.rt.scene.munich) scene.preview()
- add(item)[source]
Adds a transmitter, receiver, RIS, radio material, or camera to the scene.
If a different item with the same name as
itemis already part of the scene, an error is raised.- Input:
item (
Transmitter|Receiver|RIS|RadioMaterial|Camera) – Item to add to the scene
- property bandwidth
Get/set the transmission bandwidth [Hz]. Used for the computation of
thermal_noise_power. Defaults to 1e6.- Type:
float
- property center
Get the center of the scene
- Type:
[3], tf.float
- property dtype
Datatype used in tensors
- Type:
tf.complex64 | tf.complex128
- property frequency
Get/set the carrier frequency [Hz]
Setting the frequency updates the parameters of frequency-dependent radio materials. Defaults to 3.5e9.
- Type:
float
- get(name)[source]
Returns a scene object, transmitter, receiver, camera, or radio material
- Input:
name (str) – Name of the item to retrieve
- Output:
item (
SceneObject|RadioMaterial|Transmitter|Receiver|RIS|Camera| None) – Retrieved item. Returns None if no corresponding item was found in the scene.
- property objects
Dictionary of scene objects
- Type:
dict (read-only), { “name”,
SceneObject}
- property radio_material_callable
Get/set a callable that computes the radio material properties at the points of intersection between the rays and the scene objects.
If set, then the
RadioMaterialof the objects are not used and the callable is invoked instead to obtain the electromagnetic properties required to simulate the propagation of radio waves.If not set, i.e., None (default), then the
RadioMaterialof objects are used to simulate the propagation of radio waves in the scene.This callable is invoked on batches of intersection points. It takes as input the following tensors:
object_id([batch_dims], int) : Integers uniquely identifying the intersected objectspoints([batch_dims, 3], float) : Positions of the intersection points
The callable must output a tuple/list of the following tensors:
complex_relative_permittivity([batch_dims], complex) : Complex relative permittivities \(\eta\) (9)scattering_coefficient([batch_dims], float) : Scattering coefficients \(S\in[0,1]\) (37)xpd_coefficient([batch_dims], float) : Cross-polarization discrimination coefficients \(K_x\in[0,1]\) (39). Only relevant for the scattered field.
Note: The number of batch dimensions is not necessarily equal to one.
- property radio_materials
Dictionary of radio materials
- Type:
dict (read-only), { “name”,
RadioMaterial}
- property receivers
Dictionary of receivers in the scene
- Type:
dict (read-only), { “name”,
Receiver}
- remove(name)[source]
Removes a transmitter, receiver, RIS, camera, or radio material from the scene.
In the case of a radio material, it must not be used by any object of the scene.
- Input:
name (str) – Name of the item to remove
- property ris
Dictionary of reconfigurable intelligent surfaces (RIS) in the scene
- Type:
dict (read-only), { “name”,
RIS}
- property rx_array
Get/set the antenna array used by all receivers in the scene. Defaults to None.
- Type:
- property scattering_pattern_callable
Get/set a callable that computes the scattering pattern at the points of intersection between the rays and the scene objects.
If set, then the
scattering_patternof the radio materials of the objects are not used and the callable is invoked instead to evaluate the scattering pattern required to simulate the propagation of diffusely reflected radio waves.If not set, i.e., None (default), then the
scattering_patternof the objects’ radio materials are used to simulate the propagation of diffusely reflected radio waves in the scene.This callable is invoked on batches of intersection points. It takes as input the following tensors:
object_id([batch_dims], int) : Integers uniquely identifying the intersected objectspoints([batch_dims, 3], float) : Positions of the intersection pointsk_i([batch_dims, 3], float) : Unitary vector corresponding to the direction of incidence in the scene’s global coordinate systemk_s([batch_dims, 3], float) : Unitary vector corresponding to the direction of the diffuse reflection in the scene’s global coordinate systemn([batch_dims, 3], float) : Unitary vector corresponding to the normal to the surface at the intersection point
The callable must output the following tensor:
f_s([batch_dims], float) : The scattering pattern evaluated for the previous inputs
Note: The number of batch dimensions is not necessarily equal to one.
- property size
Get the size of the scene, i.e., the size of the axis-aligned minimum bounding box for the scene
- Type:
[3], tf.float
- property synthetic_array
Get/set if the antenna arrays are applied synthetically. Defaults to True.
- Type:
bool
- property temperature
Get/set the environment temperature [K]. Used for the computation of
thermal_noise_power. Defaults to 293.- Type:
float
- property thermal_noise_power
Get the thermal noise power [W]
- Type:
float
- property transmitters
Dictionary of transmitters in the scene
- Type:
dict (read-only), { “name”,
Transmitter}
- property tx_array
Get/set the antenna array used by all transmitters in the scene. Defaults to None.
- Type:
- property wavelength
Get the wavelength [m]
- Type:
float (read-only)
- property wavenumber
Get the wavenumber \(k=2\pi/\lambda\) [m^-1]
- Type:
float (read-only)
compute_paths
- sionna.rt.Scene.compute_paths(self, max_depth=3, method='fibonacci', num_samples=1000000, los=True, reflection=True, diffraction=False, scattering=False, ris=True, scat_keep_prob=0.001, edge_diffraction=False, check_scene=True, scat_random_phases=True, testing=False)
Computes propagation paths.
This function computes propagation paths between the antennas of all transmitters and receivers in the current scene. For each propagation path \(i\), the corresponding channel coefficient \(a_i\) and delay \(\tau_i\), as well as the angles of departure \((\theta_{\text{T},i}, \varphi_{\text{T},i})\) and arrival \((\theta_{\text{R},i}, \varphi_{\text{R},i})\) are returned. For more detail, see (26). Different propagation phenomena, such as line-of-sight, reflection, diffraction, and diffuse scattering can be individually enabled/disabled.
If the scene is configured to use synthetic arrays (
synthetic_arrayis True), transmitters and receivers are modelled as if they had a single antenna located at theirposition. The channel responses for each individual antenna of the arrays are then computed “synthetically” by applying appropriate phase shifts. This reduces the complexity significantly for large arrays. Time evolution of the channel coefficients can be simulated with the help of the functionapply_doppler()of the returnedPathsobject.The path computation consists of two main steps as shown in the below figure.

For a configured
Scene, the function first traces geometric propagation paths usingtrace_paths(). This step is independent of theRadioMaterialof the scene objects as well as the transmitters’ and receivers’ antennapatternsandorientation, but depends on the selected propagation phenomena, such as reflection, scattering, and diffraction. The traced paths are then converted to EM fields by the functioncompute_fields(). The resultingPathsobject can be used to compute channel impulse responses viacir(). The advantage of separating path tracing and field computation is that one can study the impact of different radio materials by executingcompute_fields()multiple times without re-tracing the propagation paths. This can for example speed-up the calibration of scene parameters by several orders of magnitude.Example
import sionna from sionna.rt import load_scene, Camera, Transmitter, Receiver, PlanarArray # Load example scene scene = load_scene(sionna.rt.scene.munich) # Configure antenna array for all transmitters scene.tx_array = PlanarArray(num_rows=8, num_cols=2, vertical_spacing=0.7, horizontal_spacing=0.5, pattern="tr38901", polarization="VH") # Configure antenna array for all receivers scene.rx_array = PlanarArray(num_rows=1, num_cols=1, vertical_spacing=0.5, horizontal_spacing=0.5, pattern="dipole", polarization="cross") # Create transmitter tx = Transmitter(name="tx", position=[8.5,21,27], orientation=[0,0,0]) scene.add(tx) # Create a receiver rx = Receiver(name="rx", position=[45,90,1.5], orientation=[0,0,0]) scene.add(rx) # TX points towards RX tx.look_at(rx) # Compute paths paths = scene.compute_paths() # Open preview showing paths scene.preview(paths=paths, resolution=[1000,600])
- Input:
max_depth (int) – Maximum depth (i.e., number of bounces) allowed for tracing the paths. Defaults to 3.
method (str (“exhaustive”|”fibonacci”)) – Ray tracing method to be used. The “exhaustive” method tests all possible combinations of primitives. This method is not compatible with scattering. The “fibonacci” method uses a shoot-and-bounce approach to find candidate chains of primitives. Initial ray directions are chosen according to a Fibonacci lattice on the unit sphere. This method can be applied to very large scenes. However, there is no guarantee that all possible paths are found. Defaults to “fibonacci”.
num_samples (int) – Number of rays to trace in order to generate candidates with the “fibonacci” method. This number is split equally among the different transmitters (when using synthetic arrays) or transmit antennas (when not using synthetic arrays). This parameter is ignored when using the exhaustive method. Tracing more rays can lead to better precision at the cost of increased memory requirements. Defaults to 1e6.
los (bool) – If set to True, then the LoS paths are computed. Defaults to True.
reflection (bool) – If set to True, then the reflected paths are computed. Defaults to True.
diffraction (bool) – If set to True, then the diffracted paths are computed. Defaults to False.
scattering (bool) – If set to True, then the scattered paths are computed. If set to True, then the scattered paths are computed. Only works with the Fibonacci method. Defaults to False.
ris (bool) – If set to True, then paths involving RIS are computed. Defaults to True.
scat_keep_prob (float) – Probability with which a scattered path is kept. This is helpful to reduce the number of computed scattered paths, which might be prohibitively high in some scenes. Must be in the range (0,1). Defaults to 0.001.
edge_diffraction (bool) – If set to False, only diffraction on wedges, i.e., edges that connect two primitives, is considered. Defaults to False.
check_scene (bool) – If set to True, checks that the scene is well configured before computing the paths. This can add a significant overhead. Defaults to True.
scat_random_phases (bool) – If set to True and if scattering is enabled, random uniform phase shifts are added to the scattered paths. Defaults to True.
testing (bool) – If set to True, then additional data is returned for testing. Defaults to False.
- Output:
paths :
Paths– Simulated paths
trace_paths
- sionna.rt.Scene.trace_paths(self, max_depth=3, method='fibonacci', num_samples=1000000, los=True, reflection=True, diffraction=False, scattering=False, ris=True, scat_keep_prob=0.001, edge_diffraction=False, check_scene=True)
Computes the trajectories of the paths by shooting rays.
The EM fields corresponding to the traced paths are not computed. They can be computed using
compute_fields():traced_paths = scene.trace_paths() paths = scene.compute_fields(*traced_paths)
Path tracing is independent of the radio materials, antenna patterns, and radio device orientations. Therefore, a set of traced paths could be reused for different values of these quantities, e.g., to calibrate the ray tracer. This can enable significant resource savings as path tracing is typically significantly more resource-intensive than field computation.
Note that
compute_paths()does both path tracing and field computation.- Input:
max_depth (int) – Maximum depth (i.e., number of interaction with objects in the scene) allowed for tracing the paths. Defaults to 3.
method (str (“exhaustive”|”fibonacci”)) – Method to be used to list candidate paths. The “exhaustive” method tests all possible combination of primitives as paths. This method is not compatible with scattering. The “fibonacci” method uses a shoot-and-bounce approach to find candidate chains of primitives. Initial ray directions are arranged in a Fibonacci lattice on the unit sphere. This method can be applied to very large scenes. However, there is no guarantee that all possible paths are found. Defaults to “fibonacci”.
num_samples (int) – Number of random rays to trace in order to generate candidates. A large sample count may exhaust GPU memory. Defaults to 1e6. Only needed if
methodis “fibonacci”.los (bool) – If set to True, then the LoS paths are computed. Defaults to True.
reflection (bool) – If set to True, then the reflected paths are computed. Defaults to True.
diffraction (bool) – If set to True, then the diffracted paths are computed. Defaults to False.
scattering (bool) – If set to True, then the scattered paths are computed. Only works with the Fibonacci method. Defaults to False.
ris (bool) – If set to True, then the paths involving RIS are computed. Defaults to True.
scat_keep_prob (float) – Probability with which to keep scattered paths. This is helpful to reduce the number of scattered paths computed, which might be prohibitively high in some setup. Must be in the range (0,1). Defaults to 0.001.
edge_diffraction (bool) – If set to False, only diffraction on wedges, i.e., edges that connect two primitives, is considered. Defaults to False.
check_scene (bool) – If set to True, checks that the scene is well configured before computing the paths. This can add a significant overhead. Defaults to True.
- Output:
spec_paths (
Paths) – Computed specular pathsdiff_paths (
Paths) – Computed diffracted pathsscat_paths (
Paths) – Computed scattered pathsris_paths (
Paths) – Computed paths involving RISspec_paths_tmp (
PathsTmpData) – Additional data required to compute the EM fields of the specular pathsdiff_paths_tmp (
PathsTmpData) – Additional data required to compute the EM fields of the diffracted pathsscat_paths_tmp (
PathsTmpData) – Additional data required to compute the EM fields of the scattered pathsris_paths_tmp (
PathsTmpData) – Additional data required to compute the EM fields of the paths involving RIS
compute_fields
- sionna.rt.Scene.compute_fields(self, spec_paths, diff_paths, scat_paths, spec_paths_tmp, diff_paths_tmp, scat_paths_tmp, check_scene=True, scat_random_phases=True)
Computes the EM fields corresponding to traced paths.
Paths can be traced using
trace_paths(). This method can then be used to finalize the paths calculation by computing the corresponding fields:traced_paths = scene.trace_paths() paths = scene.compute_fields(*traced_paths)
Paths tracing is independent from the radio materials, antenna patterns, and radio devices orientations. Therefore, a set of traced paths could be reused for different values of these quantities, e.g., to calibrate the ray tracer. This can enable significant resource savings as paths tracing is typically significantly more resource-intensive than field computation.
Note that
compute_paths()does both tracing and field computation.- Input:
spec_paths (
Paths) – Specular pathsdiff_paths (
Paths) – Diffracted pathsscat_paths (
Paths) – Scattered pathsris_paths (
Paths) – Computed paths involving RISris_paths (
Paths) – Computed paths involving RISspec_paths_tmp (
PathsTmpData) – Additional data required to compute the EM fields of the specular pathsdiff_paths_tmp (
PathsTmpData) – Additional data required to compute the EM fields of the diffracted pathsscat_paths_tmp (
PathsTmpData) – Additional data required to compute the EM fields of the scattered pathsris_paths_tmp (
PathsTmpData) – Additional data required to compute the EM fields of the paths involving RISris_paths_tmp (
PathsTmpData) – Additional data required to compute the EM fields of the paths involving RIScheck_scene (bool) – If set to True, checks that the scene is well configured before computing the paths. This can add a significant overhead. Defaults to True.
scat_random_phases (bool) – If set to True and if scattering is enabled, random uniform phase shifts are added to the scattered paths. Defaults to True.
- Output:
paths (
Paths) – Computed paths
coverage_map
- sionna.rt.Scene.coverage_map(self, rx_orientation=(0.0, 0.0, 0.0), max_depth=3, cm_center=None, cm_orientation=None, cm_size=None, cm_cell_size=(10.0, 10.0), combining_vec=None, precoding_vec=None, num_samples=2000000, los=True, reflection=True, diffraction=False, scattering=False, ris=True, edge_diffraction=False, check_scene=True, num_runs=1)
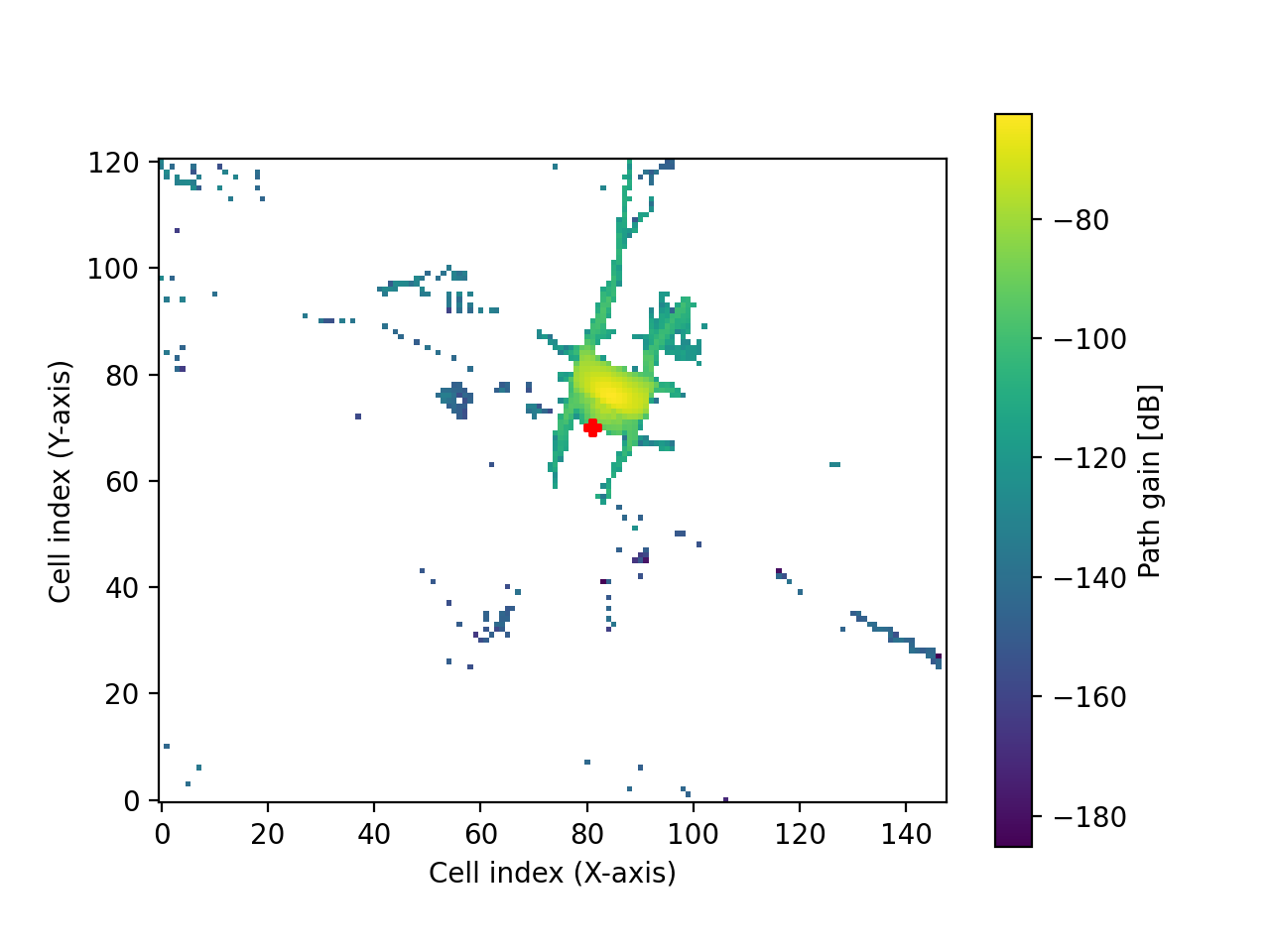
This function computes a coverage map for every transmitter in the scene.
For a given transmitter, a coverage map is a rectangular surface with arbitrary orientation subdivded into rectangular cells of size \(\lvert C \rvert = \texttt{cm_cell_size[0]} \times \texttt{cm_cell_size[1]}\). The parameter
cm_cell_sizetherefore controls the granularity of the map. The coverage map associates with every cell \((i,j)\) the quantity(52)\[g_{i,j} = \frac{1}{\lvert C \rvert} \int_{C_{i,j}} \lvert h(s) \rvert^2 ds\]where \(\lvert h(s) \rvert^2\) is the squared amplitude of the path coefficients \(a_i\) at position \(s=(x,y)\), the integral is over the cell \(C_{i,j}\), and \(ds\) is the infinitesimal small surface element \(ds=dx \cdot dy\). The dimension indexed by \(i\) (\(j\)) corresponds to the \(y\, (x)\)-axis of the coverage map in its local coordinate system. The quantity \(g_{i,j}\) can be seen as the average
path_gainacross a cell.The path gain can be transformed into the received signal strength (
rss) by multiplying it with the transmitpower:\[\mathrm{RSS}_{i,j} = P_{tx} g_{i,j}.\]If a scene has multiple transmitters, the signal-to-interference-plus-noise ratio (
sinr) for transmitter \(k\) is then defined as\[\mathrm{SINR}^k_{i,j}=\frac{\mathrm{RSS}^k_{i,j}}{N_0+\sum_{k'\ne k} \mathrm{RSS}^{k'}_{i,j}}\]where \(N_0\) [W] is the
thermal_noise_power, computed as:\[N_0 = B \times T \times k\]where \(B\) [Hz] is the transmission
bandwidth, \(T\) [K] is thetemperature, and \(k=1.380649\times 10^{-23}\) [J/K] is the Boltzmann constant.For specularly and diffusely reflected paths, (52) can be rewritten as an integral over the directions of departure of the rays from the transmitter, by substituting \(s\) with the corresponding direction \(\omega\):
\[g_{i,j} = \frac{1}{\lvert C \rvert} \int_{\Omega} \lvert h\left(s(\omega) \right) \rvert^2 \frac{r(\omega)^2}{\lvert \cos{\alpha(\omega)} \rvert} \mathbb{1}_{\left\{ s(\omega) \in C_{i,j} \right\}} d\omega\]where the integration is over the unit sphere \(\Omega\), \(r(\omega)\) is the length of the path with direction of departure \(\omega\), \(s(\omega)\) is the point where the path with direction of departure \(\omega\) intersects the coverage map, \(\alpha(\omega)\) is the angle between the coverage map normal and the direction of arrival of the path with direction of departure \(\omega\), and \(\mathbb{1}_{\left\{ s(\omega) \in C_{i,j} \right\}}\) is the function that takes as value one if \(s(\omega) \in C_{i,j}\) and zero otherwise. Note that \(ds = \frac{r(\omega)^2 d\omega}{\lvert \cos{\alpha(\omega)} \rvert}\).
The previous integral is approximated through Monte Carlo sampling by shooting \(N\) rays with directions \(\omega_n\) arranged as a Fibonacci lattice on the unit sphere around the transmitter, and bouncing the rays on the intersected objects until the maximum depth (
max_depth) is reached or the ray bounces out of the scene. At every intersection with an object of the scene, a new ray is shot from the intersection which corresponds to either specular reflection or diffuse scattering, following a Bernoulli distribution with parameter the squared scattering coefficient. When diffuse scattering is selected, the direction of the scattered ray is uniformly sampled on the half-sphere. The resulting Monte Carlo estimate is:(53)\[\hat{g}_{i,j}^{\text{(ref)}} = \frac{4\pi}{N\lvert C \rvert} \sum_{n=1}^N \lvert h\left(s(\omega_n)\right) \rvert^2 \frac{r(\omega_n)^2}{\lvert \cos{\alpha(\omega_n)} \rvert} \mathbb{1}_{\left\{ s(\omega_n) \in C_{i,j} \right\}}.\]For the diffracted paths, (52) can be rewritten for any wedge with length \(L\) and opening angle \(\Phi\) as an integral over the wedge and its opening angle, by substituting \(s\) with the position on the wedge \(\ell \in [1,L]\) and the angle \(\phi \in [0, \Phi]\):
\[g_{i,j} = \frac{1}{\lvert C \rvert} \int_{\ell} \int_{\phi} \lvert h\left(s(\ell,\phi) \right) \rvert^2 \mathbb{1}_{\left\{ s(\ell,\phi) \in C_{i,j} \right\}} \left\lVert \frac{\partial r}{\partial \ell} \times \frac{\partial r}{\partial \phi} \right\rVert d\ell d\phi\]where the integral is over the wedge length \(L\) and opening angle \(\Phi\), and \(r\left( \ell, \phi \right)\) is the reparametrization with respected to \((\ell, \phi)\) of the intersection between the diffraction cone at \(\ell\) and the rectangle defining the coverage map (see, e.g., [SurfaceIntegral]). The previous integral is approximated through Monte Carlo sampling by shooting \(N'\) rays from equally spaced locations \(\ell_n\) along the wedge with directions \(\phi_n\) sampled uniformly from \((0, \Phi)\):
(54)\[\hat{g}_{i,j}^{\text{(diff)}} = \frac{L\Phi}{N'\lvert C \rvert} \sum_{n=1}^{N'} \lvert h\left(s(\ell_n,\phi_n)\right) \rvert^2 \mathbb{1}_{\left\{ s(\ell_n,\phi_n) \in C_{i,j} \right\}} \left\lVert \left(\frac{\partial r}{\partial \ell}\right)_n \times \left(\frac{\partial r}{\partial \phi}\right)_n \right\rVert.\]The output of this function is therefore a real-valued matrix of size
[num_cells_y, num_cells_x], for every transmitter, with elements equal to the sum of the contributions of the reflected and scattered paths (53) and diffracted paths (54) for all the wedges, and where\[\begin{split}\texttt{num_cells_x} = \bigg\lceil\frac{\texttt{cm_size[0]}}{\texttt{cm_cell_size[0]}} \bigg\rceil\\ \texttt{num_cells_y} = \bigg\lceil \frac{\texttt{cm_size[1]}}{\texttt{cm_cell_size[1]}} \bigg\rceil.\end{split}\]The surface defining the coverage map is a rectangle centered at
cm_center, with orientationcm_orientation, and with sizecm_size. An orientation of (0,0,0) corresponds to a coverage map parallel to the XY plane, with surface normal pointing towards the \(+z\) axis. By default, the coverage map is parallel to the XY plane, covers all of the scene, and has an elevation of \(z = 1.5\text{m}\). The receiver is assumed to use the antenna arrayscene.rx_array. If transmitter and/or receiver have multiple antennas, transmit precoding and receive combining are applied which are defined byprecoding_vecandcombining_vec, respectively.The \((i,j)\) indices are omitted in the following for clarity. For reflection and scattering, paths are generated by shooting
num_samplesrays from the transmitters with directions arranged in a Fibonacci lattice on the unit sphere and by simulating their propagation for up tomax_depthinteractions with scene objects. Ifmax_depthis set to 0 and iflosis set to True, only the line-of-sight path is considered. For diffraction, paths are generated by shootingnum_samplesrays from equally spaced locations along the wedges in line-of-sight with the transmitter, with directions uniformly sampled on the diffraction cone.For every ray \(n\) intersecting the coverage map cell \((i,j)\), the channel coefficients, \(a_n\), and the angles of departure (AoDs) \((\theta_{\text{T},n}, \varphi_{\text{T},n})\) and arrival (AoAs) \((\theta_{\text{R},n}, \varphi_{\text{R},n})\) are computed. See the Primer on Electromagnetics for more details.
A “synthetic” array is simulated by adding additional phase shifts that depend on the antenna position relative to the position of the transmitter (receiver) as well as the AoDs (AoAs). For the \(k^\text{th}\) transmit antenna and \(\ell^\text{th}\) receive antenna, let us denote by \(\mathbf{d}_{\text{T},k}\) and \(\mathbf{d}_{\text{R},\ell}\) the relative positions (with respect to the positions of the transmitter/receiver) of the pair of antennas for which the channel impulse response shall be computed. These can be accessed through the antenna array’s property
positions. Using a plane-wave assumption, the resulting phase shifts from these displacements can be computed as\[\begin{split}p_{\text{T}, n,k} &= \frac{2\pi}{\lambda}\hat{\mathbf{r}}(\theta_{\text{T},n}, \varphi_{\text{T},n})^\mathsf{T} \mathbf{d}_{\text{T},k}\\ p_{\text{R}, n,\ell} &= \frac{2\pi}{\lambda}\hat{\mathbf{r}}(\theta_{\text{R},n}, \varphi_{\text{R},n})^\mathsf{T} \mathbf{d}_{\text{R},\ell}.\end{split}\]The final expression for the path coefficient is
\[h_{n,k,\ell} = a_n e^{j(p_{\text{T}, i,k} + p_{\text{R}, i,\ell})}\]for every transmit antenna \(k\) and receive antenna \(\ell\). These coefficients form the complex-valued channel matrix, \(\mathbf{H}_n\), of size \(\texttt{num_rx_ant} \times \texttt{num_tx_ant}\).
Finally, the coefficient of the equivalent SISO channel is
\[h_n = \mathbf{c}^{\mathsf{H}} \mathbf{H}_n \mathbf{p}\]where \(\mathbf{c}\) and \(\mathbf{p}\) are the combining and precoding vectors (
combining_vecandprecoding_vec), respectively.Example
import sionna from sionna.rt import load_scene, PlanarArray, Transmitter, Receiver scene = load_scene(sionna.rt.scene.munich) # Configure antenna array for all transmitters scene.tx_array = PlanarArray(num_rows=8, num_cols=2, vertical_spacing=0.7, horizontal_spacing=0.5, pattern="tr38901", polarization="VH") # Configure antenna array for all receivers scene.rx_array = PlanarArray(num_rows=1, num_cols=1, vertical_spacing=0.5, horizontal_spacing=0.5, pattern="dipole", polarization="cross") # Add a transmitters tx = Transmitter(name="tx", position=[8.5,21,30], orientation=[0,0,0]) scene.add(tx) tx.look_at([40,80,1.5]) # Compute coverage map cm = scene.coverage_map(cm_cell_size=[1.,1.], num_samples=int(10e6)) # Visualize coverage in preview scene.preview(coverage_map=cm, resolution=[1000, 600])
- Input:
rx_orientation ([3], float) – Orientation of the receiver \((\alpha, \beta, \gamma)\) specified through three angles corresponding to a 3D rotation as defined in (3). Defaults to \((0,0,0)\).
max_depth (int) – Maximum depth (i.e., number of bounces) allowed for tracing the paths. Defaults to 3.
cm_center ([3], float | None) – Center of the coverage map \((x,y,z)\) as three-dimensional vector. If set to None, the coverage map is centered on the center of the scene, except for the elevation \(z\) that is set to 1.5m. Otherwise,
cm_orientationandcm_scalemust also not be None. Defaults to None.cm_orientation ([3], float | None) – Orientation of the coverage map \((\alpha, \beta, \gamma)\) specified through three angles corresponding to a 3D rotation as defined in (3). An orientation of \((0,0,0)\) or None corresponds to a coverage map that is parallel to the XY plane. If not set to None, then
cm_centerandcm_scalemust also not be None. Defaults to None.cm_size ([2], float | None) – Size of the coverage map [m]. If set to None, then the size of the coverage map is set such that it covers the entire scene. Otherwise,
cm_centerandcm_orientationmust also not be None. Defaults to None.cm_cell_size ([2], float) – Size of a cell of the coverage map [m]. Defaults to \((10,10)\).
combining_vec ([num_rx_ant], complex | None) – Combining vector. If set to None, then no combining is applied, and the energy received by all antennas is summed.
precoding_vec ([num_tx_ant] | [num_tx, num_tx_ant], complex | None) – Precoding vector. If set to None, then defaults to \(\frac{1}{\sqrt{\text{num_tx_ant}}} [1,\dots,1]^{\mathsf{T}}\).
num_samples (int) – Number of random rays to trace. For the reflected paths, this number is split equally over the different transmitters. For the diffracted paths, it is split over the wedges in line-of-sight with the transmitters such that the number of rays allocated to a wedge is proportional to its length. Defaults to 2e6.
los (bool) – If set to True, then the LoS paths are computed. Defaults to True.
reflection (bool) – If set to True, then the reflected paths are computed. Defaults to True.
diffraction (bool) – If set to True, then the diffracted paths are computed. Defaults to False.
scattering (bool) – If set to True, then the scattered paths are computed. Defaults to False.
ris (bool) – If set to True, then paths involving RIS are computed. Defaults to True.
edge_diffraction (bool) – If set to False, only diffraction on wedges, i.e., edges that connect two primitives, is considered. Defaults to False.
check_scene (bool) – If set to True, checks that the scene is well configured before computing the coverage map. This can add a significant overhead. Defaults to True.
num_runs (int, >= 1) – Number of times the coverage map solver is executed. The returned coverage map is the average over all runs. If set to a value greater than one, a random rotation is applied to the Fibonacci lattice at each run. Using mutiple runs can reduce noise in the coverage map without increasing
num_samplesand the related memory footprint. Defaults to 1.
- Output:
cm :
CoverageMap– Coverage map
preview
- sionna.rt.Scene.preview(self, paths=None, show_paths=True, show_devices=True, show_orientations=False, coverage_map=None, cm_tx=None, cm_db_scale=True, cm_vmin=None, cm_vmax=None, cm_metric='path_gain', resolution=(655, 500), fov=45, background='#ffffff', clip_at=None, clip_plane_orientation=(0, 0, -1))
In an interactive notebook environment, opens an interactive 3D viewer of the scene.
The returned value of this method must be the last line of the cell so that it is displayed. For example:
fig = scene.preview() # ... fig
Or simply:
scene.preview()
Default color coding:
Green: Receiver
Blue: Transmitter
Red: Reconfigurable Intelligent Surface (RIS)
Controls:
Mouse left: Rotate
Scroll wheel: Zoom
Mouse right: Move
- Input:
paths (
Paths| None) – Simulated paths generated bycompute_paths()or None. If None, only the scene is rendered. Defaults to None.show_paths (bool) – If paths is not None, shows the paths. Defaults to True.
show_devices (bool) – If set to True, shows the radio devices. Defaults to True.
show_orientations (bool) – If show_devices is True, shows the radio devices orientations. Defaults to False.
coverage_map (
CoverageMap| None) – An optional coverage map to overlay in the scene for visualization. Defaults to None.cm_tx (int | str | None) – When coverage_map is specified, controls which of the transmitters to display the coverage map for. Either the transmitter’s name or index can be given. If None, the maximum metric over all transmitters is shown. Defaults to None.
cm_db_scale (bool) – Use logarithmic scale for coverage map visualization, i.e. the coverage values are mapped with: \(y = 10 \cdot \log_{10}(x)\). Defaults to True.
cm_vmin, cm_vmax (floot | None) – For coverage map visualization, defines the range of path gains that the colormap covers. These parameters should be provided in dB if
cm_db_scaleis set to True, or in linear scale otherwise. If set to None, then covers the complete range. Defaults to None.cm_metric (str, one of [“path_gain”, “rss”, “sinr”]) – Metric of the coverage map to be displayed. Defaults to path_gain.
resolution ([2], int) – Size of the viewer figure. Defaults to [655, 500].
fov (float) – Field of view, in degrees. Defaults to 45°.
background (str) – Background color in hex format prefixed by ‘#’. Defaults to ‘#ffffff’ (white).
clip_at (float) – If not None, the scene preview will be clipped (cut) by a plane with normal orientation
clip_plane_orientationand offsetclip_at. That means that everything behind the plane becomes invisible. This allows visualizing the interior of meshes, such as buildings. Defaults to None.clip_plane_orientation (tuple[float, float, float]) – Normal vector of the clipping plane. Defaults to (0,0,-1).
render
- sionna.rt.Scene.render(self, camera, paths=None, show_paths=True, show_devices=True, coverage_map=None, cm_tx=None, cm_db_scale=True, cm_vmin=None, cm_vmax=None, cm_metric='path_gain', cm_show_color_bar=True, num_samples=512, resolution=(655, 500), fov=45)
Renders the scene from the viewpoint of a camera or the interactive viewer
- Input:
camera (str |
Camera) – The name or instance of aCamera. If an interactive viewer was opened withpreview(), set to “preview” to use its viewpoint.paths (
Paths| None) – Simulated paths generated bycompute_paths()or None. If None, only the scene is rendered. Defaults to None.show_paths (bool) – If paths is not None, shows the paths. Defaults to True.
show_devices (bool) – If paths is not None, shows the radio devices. Defaults to True.
coverage_map (
CoverageMap| None) – An optional coverage map to overlay in the scene for visualization. Defaults to None.cm_tx (int | str | None) – When coverage_map is specified, controls which of the transmitters to display the coverage map for. Either the transmitter’s name or index can be given. If None, the maximum metric over all transmitters is shown. Defaults to None.
cm_db_scale (bool) – Use logarithmic scale for coverage map visualization, i.e. the coverage values are mapped with: \(y = 10 \cdot \log_{10}(x)\). Defaults to True.
cm_vmin, cm_vmax (float | None) – For coverage map visualization, defines the range of path gains that the colormap covers. These parameters should be provided in dB if
cm_db_scaleis set to True, or in linear scale otherwise. If set to None, then covers the complete range. Defaults to None.cm_metric (str, one of [“path_gain”, “rss”, “sinr”]) – Metric of the coverage map to be displayed. Defaults to path_gain.
cm_show_color_bar (bool) – For coverage map visualization, show the color bar describing the color mapping used next to the rendering. Defaults to True.
num_samples (int) – Number of rays thrown per pixel. Defaults to 512.
resolution ([2], int) – Size of the rendered figure. Defaults to [655, 500].
fov (float) – Field of view, in degrees. Defaults to 45°.
- Output:
Figure– Rendered image
render_to_file
- sionna.rt.Scene.render_to_file(self, camera, filename, paths=None, show_paths=True, show_devices=True, coverage_map=None, cm_tx=None, cm_db_scale=True, cm_vmin=None, cm_vmax=None, cm_metric='path_gain', num_samples=512, resolution=(655, 500), fov=45)
Renders the scene from the viewpoint of a camera or the interactive viewer, and saves the resulting image
- Input:
camera (str |
Camera) – The name or instance of aCamera. If an interactive viewer was opened withpreview(), set to “preview” to use its viewpoint.filename (str) – Filename for saving the rendered image, e.g., “my_scene.png”
paths (
Paths| None) – Simulated paths generated bycompute_paths()or None. If None, only the scene is rendered. Defaults to None.show_paths (bool) – If paths is not None, shows the paths. Defaults to True.
show_devices (bool) – If paths is not None, shows the radio devices. Defaults to True.
coverage_map (
CoverageMap| None) – An optional coverage map to overlay in the scene for visualization. Defaults to None.cm_tx (int | str | None) – When coverage_map is specified, controls which of the transmitters to display the coverage map for. Either the transmitter’s name or index can be given. If None, the maximum metric over all transmitters is shown. Defaults to None.
cm_db_scale (bool) – Use logarithmic scale for coverage map visualization, i.e. the coverage values are mapped with: \(y = 10 \cdot \log_{10}(x)\). Defaults to True.
cm_vmin, cm_vmax (float | None) – For coverage map visualization, defines the range of path gains that the colormap covers. These parameters should be provided in dB if
cm_db_scaleis set to True, or in linear scale otherwise. If set to None, then covers the complete range. Defaults to None.cm_metric (str, one of [“path_gain”, “rss”, “sinr”]) – Metric of the coverage map to be displayed. Defaults to path_gain.
num_samples (int) – Number of rays thrown per pixel. Defaults to 512.
resolution ([2], int) – Size of the rendered figure. Defaults to [655, 500].
fov (float) – Field of view, in degrees. Defaults to 45°.
load_scene
- sionna.rt.load_scene(filename=None, dtype=tf.complex64)[source]
Load a scene from file
Note that only one scene can be loaded at a time.
- Input:
filename (str) – Name of a valid scene file. Sionna uses the simple XML-based format from Mitsuba 3. Defaults to None for which an empty scene is created.
dtype (tf.complex) – Dtype used for all internal computations and outputs. Defaults to tf.complex64.
- Output:
scene (
Scene) – Reference to the current scene
Example Scenes
Sionna has several integrated scenes that are listed below. They can be loaded and used as follows:
scene = load_scene(sionna.rt.scene.etoile)
scene.preview()
floor_wall
- sionna.rt.scene.floor_wall
Example scene containing a ground plane and a vertical wall
simple_street_canyon
- sionna.rt.scene.simple_street_canyon
Example scene containing a few rectangular building blocks and a ground plane
simple_street_canyon_with_cars
- sionna.rt.scene.simple_street_canyon_with_cars
Example scene containing a few rectangular building blocks and a ground plane as well as some cars
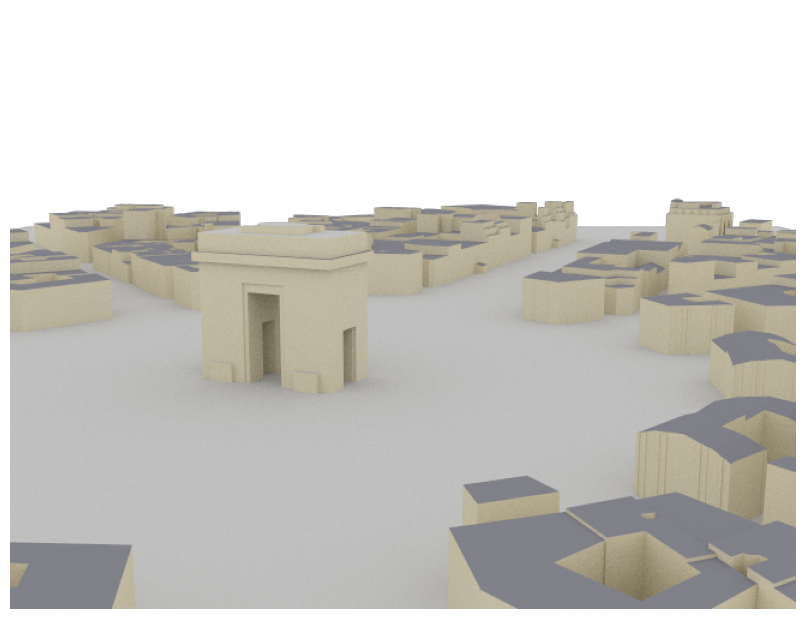
etoile
- sionna.rt.scene.etoile
Example scene containing the area around the Arc de Triomphe in Paris The scene was created with data downloaded from OpenStreetMap and the help of Blender and the Blender-OSM and Mitsuba Blender add-ons. The data is licensed under the Open Data Commons Open Database License (ODbL).
munich
- sionna.rt.scene.munich
Example scene containing the area around the Frauenkirche in Munich The scene was created with data downloaded from OpenStreetMap and the help of Blender and the Blender-OSM and Mitsuba Blender add-ons. The data is licensed under the Open Data Commons Open Database License (ODbL).
simple_wedge
- sionna.rt.scene.simple_wedge
Example scene containing a wedge with a \(90^{\circ}\) opening angle
simple_reflector
- sionna.rt.scene.simple_reflector
Example scene containing a metallic square
double_reflector
- sionna.rt.scene.double_reflector
Example scene containing two metallic squares
triple_reflector
- sionna.rt.scene.triple_reflector
Example scene containing three metallic rectangles
Box
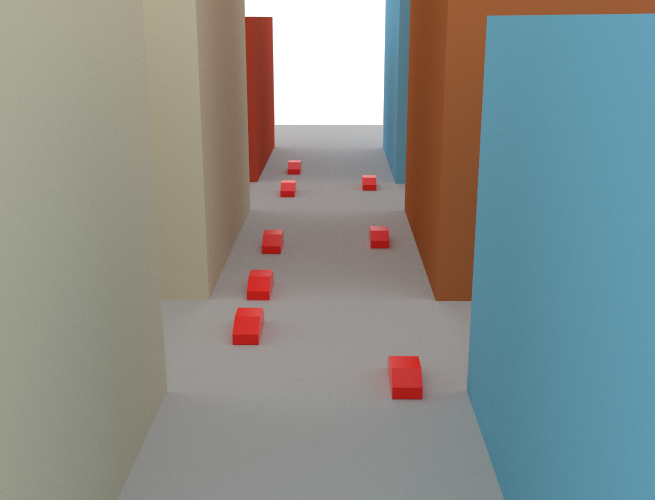
- sionna.rt.scene.box
Example scene containing a metallic box
Paths
A propagation path \(i\) starts at a transmit antenna and ends at a receive antenna. It is described by its channel coefficient \(a_i\) and delay \(\tau_i\), as well as the angles of departure \((\theta_{\text{T},i}, \varphi_{\text{T},i})\) and arrival \((\theta_{\text{R},i}, \varphi_{\text{R},i})\). For more detail, see the Primer on Electromagnetics.
In Sionna, paths are computed with the help of the function compute_paths() which returns an instance of
Paths. Paths can be visualized by providing them as arguments to the functions render(),
render_to_file(), or preview().
Channel impulse responses (CIRs) can be obtained with cir() which can
then be used for link-level simulations. This is for example done in the Sionna Ray Tracing Tutorial.
Paths
- class sionna.rt.Paths[source]
Stores the simulated propagation paths
Paths are generated for the loaded scene using
compute_paths(). Please refer to the documentation of this function for further details. These paths can then be used to compute channel impulse responses:paths = scene.compute_paths() a, tau = paths.cir()
where
sceneis theSceneloaded usingload_scene().- property a
Passband channel coefficients \(a_i\) of each path as defined in (26).
- Type:
[batch_size, num_rx, num_rx_ant, num_tx, num_tx_ant, max_num_paths, num_time_steps], tf.complex
- apply_doppler(sampling_frequency, num_time_steps, tx_velocities=(0.0, 0.0, 0.0), rx_velocities=(0.0, 0.0, 0.0))[source]
Apply Doppler shifts to all paths according to the velocities of objects in the scene as well as the provided transmitter and receiver velocities.
This function replaces the last dimension of the tensor
astoring the time evolution of the paths’ coefficients with a dimension of sizenum_time_steps.Time evolution of the channel coefficients is simulated by computing the Doppler shift due to movements of scene objects, transmitters, and receivers. To understand this process, let us consider a single propagation path undergoing \(n\) scattering processes, such as reflection, diffuse scattering, or diffraction, as shown in the figure below.
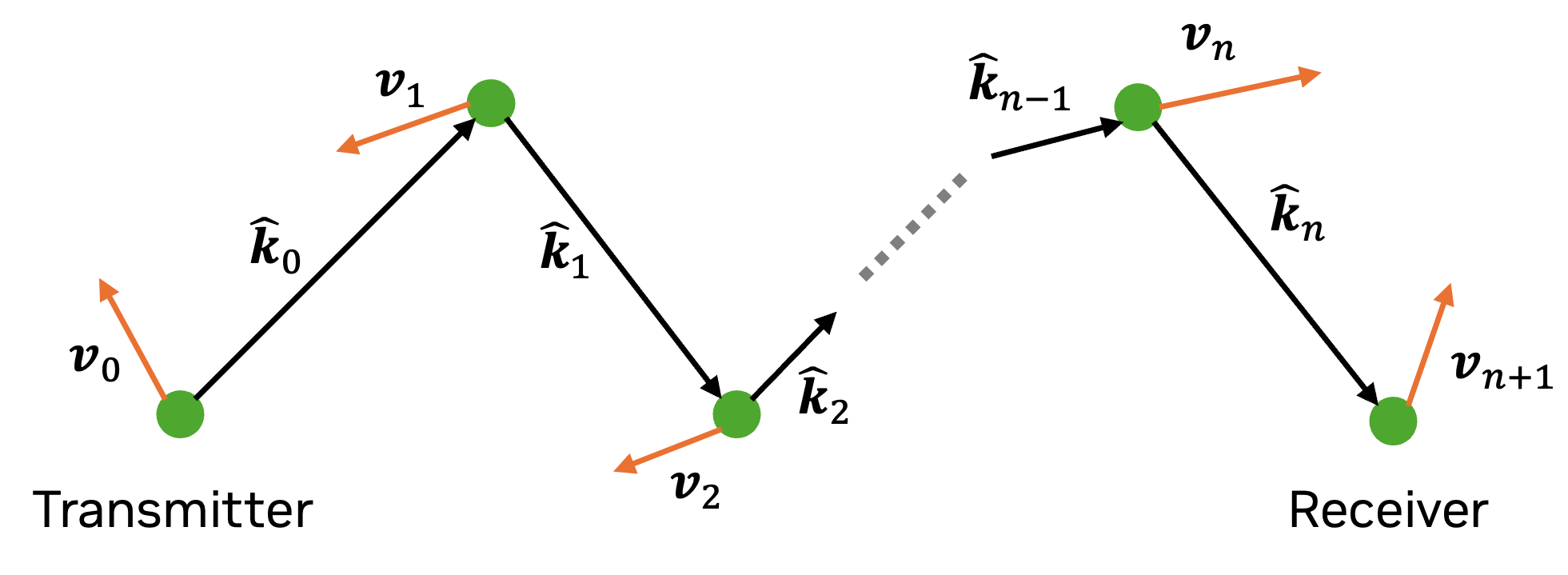
The object on which lies the \(i\text{th}\) scattering point has the velocity vector \(\hat{\mathbf{v}}_i\) and the outgoing ray direction at this point is denoted \(\hat{\mathbf{k}}_i\). The first and last point correspond to the transmitter and receiver, respectively. We therefore have
\[\begin{split}\hat{\mathbf{k}}_0 &= \hat{\mathbf{r}}(\theta_{\text{T}}, \varphi_{\text{T}})\\ \hat{\mathbf{k}}_{n} &= -\hat{\mathbf{r}}(\theta_{\text{R}}, \varphi_{\text{R}})\end{split}\]where \((\theta_{\text{T}}, \varphi_{\text{T}})\) are the AoDs, \((\theta_{\text{R}}, \varphi_{\text{R}})\) are the AoAs, and \(\hat{\mathbf{r}}(\theta,\varphi)\) is defined in (1).
If the transmitter emits a signal with frequency \(f\), the receiver will observe the signal at frequency \(f'=f + f_\Delta\), where \(f_\Delta\) is the Doppler shift, which can be computed as [Wiffen2018]
\[f' = f \prod_{i=0}^n \frac{1 - \frac{\mathbf{v}_{i+1}^\mathsf{T}\hat{\mathbf{k}}_i}{c}}{1 - \frac{\mathbf{v}_{i}^\mathsf{T}\hat{\mathbf{k}}_i}{c}}.\]Under the assumption that \(\lVert \mathbf{v}_i \rVert\ll c\), we can apply the Taylor expansion \((1-x)^{-1}\approx 1+x\), for \(x\ll 1\), to the previous equation to obtain
\[\begin{split}f' &\approx f \prod_{i=0}^n \left(1 - \frac{\mathbf{v}_{i+1}^\mathsf{T}\hat{\mathbf{k}}_i}{c}\right)\left(1 + \frac{\mathbf{v}_{i}^\mathsf{T}\hat{\mathbf{k}}_i}{c}\right)\\ &\approx f \left(1 + \sum_{i=0}^n \frac{\mathbf{v}_{i}^\mathsf{T}\hat{\mathbf{k}}_i -\mathbf{v}_{i+1}^\mathsf{T}\hat{\mathbf{k}}_i}{c} \right)\end{split}\]where the second line results from ignoring terms in \(c^{-2}\). Solving for \(f_\Delta\), grouping terms with the same \(\mathbf{v}_i\) together, and using \(f=c/\lambda\), we obtain
\[f_\Delta = \frac{1}{\lambda}\left(\mathbf{v}_{0}^\mathsf{T}\hat{\mathbf{k}}_0 - \mathbf{v}_{n+1}^\mathsf{T}\hat{\mathbf{k}}_n + \sum_{i=1}^n \mathbf{v}_{i}^\mathsf{T}\left(\hat{\mathbf{k}}_i-\hat{\mathbf{k}}_{i-1} \right) \right) \qquad \text{[Hz]}.\]Using this Doppler shift, the time-dependent path coefficient is computed as
\[a(t) = a e^{j2\pi f_\Delta t}.\]Note that this model is only valid as long as the AoDs, AoAs, and path delays do not change significantly. This is typically the case for very short time intervals. Large-scale mobility should be simulated by moving objects within the scene and recomputing the propagation paths.
When this function is called multiple times, it overwrites the previous time step dimension.
- Input:
sampling_frequency (float) – Frequency [Hz] at which the channel impulse response is sampled
num_time_steps (int) – Number of time steps.
tx_velocities ([batch_size, num_tx, 3] or broadcastable, tf.float | None) – Velocity vectors \((v_\text{x}, v_\text{y}, v_\text{z})\) of all transmitters [m/s]. Defaults to [0,0,0].
rx_velocities ([batch_size, num_rx, 3] or broadcastable, tf.float | None) – Velocity vectors \((v_\text{x}, v_\text{y}, v_\text{z})\) of all receivers [m/s]. Defaults to [0,0,0].
- cir(los=True, reflection=True, diffraction=True, scattering=True, ris=True, cluster_ris_paths=True, num_paths=None)[source]
Returns the baseband equivalent channel impulse response (28) which can be used for link simulations by other Sionna components.
The baseband equivalent channel coefficients \(a^{\text{b}}_{i}\) are computed as :
\[a^{\text{b}}_{i} = a_{i} e^{-j2 \pi f \tau_{i}}\]where \(i\) is the index of an arbitrary path, \(a_{i}\) is the passband path coefficient (
a), \(\tau_{i}\) is the path delay (tau), and \(f\) is the carrier frequency.Note: For the paths of a given type to be returned (LoS, reflection, etc.), they must have been previously computed by
compute_paths(), i.e., the corresponding flags must have been set to True.- Input:
los (bool) – If set to False, LoS paths are not returned. Defaults to True.
reflection (bool) – If set to False, specular paths are not returned. Defaults to True.
diffraction (bool) – If set to False, diffracted paths are not returned. Defaults to True.
scattering (bool) – If set to False, scattered paths are not returned. Defaults to True.
ris (bool) – If set to False, paths involving RIS are not returned. Defaults to True.
cluster_ris_paths (bool) – If set to True, the paths from each RIS are coherently combined into a single path, and the delays are averaged. Note that this process is performed separately for each RIS. For large RIS, clustering the paths significantly reduces the memory required to run link-level simulations. Defaults to True.
num_paths (int or None) – All CIRs are either zero-padded or cropped to the largest
num_pathspaths. Defaults to None which means that no padding or cropping is done.
- Output:
a ([batch_size, num_rx, num_rx_ant, num_tx, num_tx_ant, max_num_paths, num_time_steps], tf.complex) – Path coefficients
tau ([batch_size, num_rx, num_rx_ant, num_tx, num_tx_ant, max_num_paths] or [batch_size, num_rx, num_tx, max_num_paths], tf.float) – Path delays
- property doppler
Doppler shift for each path related to movement of objects. The Doppler shifts resulting from movements of the transmitters or receivers will be computed from the inputs to the function
apply_doppler().- Type:
[batch_size, num_rx, num_rx_ant, num_tx, num_tx_ant, max_num_paths] or [batch_size, num_rx, num_tx, max_num_paths], tf.float
- export(filename)[source]
Saves the paths as an OBJ file for visualisation, e.g., in Blender
- Input:
filename (str) – Path and name of the file
- from_dict(data_dict)[source]
Set the paths from a dictionary which values are tensors
The format of the dictionary is expected to be the same as the one returned by
to_dict().- Input:
data_dict (dict)
- property mask
Set to False for non-existent paths. When there are multiple transmitters or receivers, path counts may vary between links. This is used to identify non-existent paths. For such paths, the channel coefficient is set to 0 and the delay to -1.
- Type:
[batch_size, num_rx, num_rx_ant, num_tx, num_tx_ant, max_num_paths] or [batch_size, num_rx, num_tx, max_num_paths], tf.bool
- property normalize_delays
Set to True to normalize path delays such that the first path between any pair of antennas of a transmitter and receiver arrives at
tau = 0. Defaults to True.- Type:
bool
- property phi_r
Azimuth angles of arrival [rad]
- Type:
[batch_size, num_rx, num_rx_ant, num_tx, num_tx_ant, max_num_paths] or [batch_size, num_rx, num_tx, max_num_paths], tf.float
- property phi_t
Azimuth angles of departure [rad]
- Type:
[batch_size, num_rx, num_rx_ant, num_tx, num_tx_ant, max_num_paths] or [batch_size, num_rx, num_tx, max_num_paths], tf.float
- property reverse_direction
If set to True, swaps receivers and transmitters
- Type:
bool
- property tau
Propagation delay \(\tau_i\) [s] of each path as defined in (26).
- Type:
[batch_size, num_rx, num_rx_ant, num_tx, num_tx_ant, max_num_paths] or [batch_size, num_rx, num_tx, max_num_paths], tf.float
- property theta_r
Zenith angles of arrival [rad]
- Type:
[batch_size, num_rx, num_rx_ant, num_tx, num_tx_ant, max_num_paths] or [batch_size, num_rx, num_tx, max_num_paths], tf.float
- property theta_t
Zenith angles of departure [rad]
- Type:
[batch_size, num_rx, num_rx_ant, num_tx, num_tx_ant, max_num_paths] or [batch_size, num_rx, num_tx, max_num_paths], tf.float
- to_dict()[source]
Returns the properties of the paths as a dictionary which values are tensors
- Output:
dict
- property types
Type of the paths:
0 : LoS
1 : Reflected
2 : Diffracted
3 : Scattered
4 : RIS
- Type:
[batch_size, max_num_paths], tf.int
Coverage Maps
A coverage map describes a metric, such as path gain, received signal strength (RSS), or signal-to-interference-plus-noise ratio (SINR) for a specific transmitter at every point on a plane. In other words, for a given transmitter, it associates every point on a surface with the channel gain, RSS, or SINR, that a receiver with a specific orientation would observe at this point. A coverage map is not uniquely defined as it depends on the transmit and receive arrays and their respective antenna patterns, the transmitter and receiver orientations, as well as transmit precoding and receive combining vectors. Moreover, a coverage map is not continuous but discrete because the plane needs to be quantized into small rectangular bins.
In Sionna, coverage maps are computed with the help of the function
sionna.rt.Scene.coverage_map() which returns an instance of
CoverageMap. They can be visualized by providing them either as arguments to the functions render(),
render_to_file(), and preview(),
or by using the class method show().
A very useful feature is sample_positions() which allows sampling
of random positions within the scene that have sufficient path gain, RSS, or SINR from a specific transmitter.
This feature is used in the Sionna Ray Tracing Tutorial to generate a dataset of channel impulse responses
for link-level simulations.
CoverageMap
- class sionna.rt.CoverageMap[source]
Stores the simulated coverage maps
A coverage map is generated for the loaded scene for all transmitters using
coverage_map(). Please refer to the documentation of this function for further details.Example
import sionna from sionna.rt import load_scene, PlanarArray, Transmitter, Receiver scene = load_scene(sionna.rt.scene.munich) # Configure antenna array for all transmitters scene.tx_array = PlanarArray(num_rows=8, num_cols=2, vertical_spacing=0.7, horizontal_spacing=0.5, pattern="tr38901", polarization="VH") # Configure antenna array for all receivers scene.rx_array = PlanarArray(num_rows=1, num_cols=1, vertical_spacing=0.5, horizontal_spacing=0.5, pattern="dipole", polarization="cross") # Add a transmitters tx = Transmitter(name="tx", position=[8.5,21,30], orientation=[0,0,0]) scene.add(tx) tx.look_at([40,80,1.5]) # Compute coverage map cm = scene.coverage_map(max_depth=8) # Show coverage map cm.show();
- cdf(metric='path_gain', tx=None)[source]
Computes and visualizes the CDF of a metric of the coverage map
- Input:
metric (str, one of [“path_gain”, “rss”, “sinr”]) – Metric to be shown. Defaults to “path_gain”.
tx (int | str | None) – Index or name of the transmitter for which to show the coverage map. If None, the maximum value over all transmitters for each cell is shown. Defaults to None.
- Output:
Figure– Figure showing the CDFx (tf.float, [num_cells_x * num_cells_y]) – Data points for the chosen metric
cdf (tf.float, [num_cells_x * num_cells_y]) – Cummulative probabilities for the data points
- property cell_centers
Positions of the centers of the cells in the global coordinate system
- Type:
[num_cells_y, num_cells_x, 3], tf.float
- property cell_size
Resolution of the coverage map, i.e., width (in the local X direction) and height (in the local Y direction) in of the cells of the coverage map
- Type:
[2], tf.float
- cell_to_tx(metric)[source]
Computes cell-to-transmitter association. Each cell is associated with the transmitter providing the highest metric, such as path gain, received signal strength (RSS), or SINR.
- Input:
metric (str, one of [“path_gain”, “rss”, “sinr”]) – Metric to be used
- Output:
cell_to_tx ([num_cells_y, num_cells_x], tf.int64) – Cell-to-transmitter association
- property center
Center of the coverage map in the global coordinate system
- Type:
[3], tf.float
- property num_cells_x
Number of cells along the local X-axis
- Type:
int
- property num_cells_y
Number of cells along the local Y-axis
- Type:
int
- property num_tx
Number of transmitters
- Type:
int
- property orientation
Orientation of the coverage map \((\alpha, \beta, \gamma)\) specified through three angles corresponding to a 3D rotation as defined in (3). An orientation of \((0,0,0)\) corresponds to a coverage map that is parallel to the XY plane.
- Type:
[3], tf.float
- property path_gain
Path gains across the coverage map from all transmitters
- Type:
[num_tx, num_cells_y, num_cells_x], tf.float
- property ris_pos
(column, row) cell index position of each RIS
- Type:
[num_ris, 2], int
- property rss
Received signal strength (RSS) across the coverage map from all transmitters
- Type:
[num_tx, num_cells_y, num_cells_x], tf.float
- property rx_pos
(column, row) cell index position of each receiver
- Type:
[num_rx, 2], int
- sample_positions(num_pos, metric='path_gain', min_val_db=None, max_val_db=None, min_dist=None, max_dist=None, tx_association=True, center_pos=False)[source]
Sample random user positions in a scene based on a coverage map
For a given coverage map,
num_posrandom positions are sampled around each transmitter, such that the selected metric, e.g., SINR, is larger thanmin_val_dband/or smaller thanmax_val_db. Similarly,min_distandmax_distdefine the minimum and maximum distance of the random positions to the transmitter under consideration. By activating the flagtx_association, only positions are sampled for which the selected metric is the highest across all transmitters. This is useful if one wants to ensure, e.g., that the sampled positions for each transmitter provide the highest SINR or RSS.Note that due to the quantization of the coverage map into cells it is not guaranteed that all above parameters are exactly fulfilled for a returned position. This stems from the fact that every individual cell of the coverage map describes the expected average behavior of the surface within this cell. For instance, it may happen that half of the selected cell is shadowed and, thus, no path to the transmitter exists but the average path gain is still larger than the given threshold. Please enable the flag
center_posto sample only positions from the cell centers.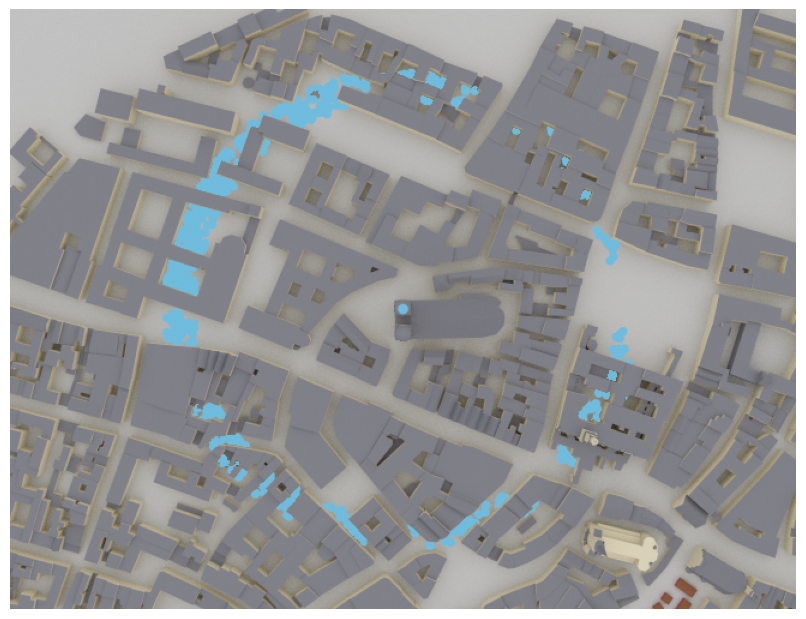
The above figure shows an example for random positions between 220m and 250m from the transmitter and a maximum path gain of -100 dB. Keep in mind that the transmitter can have a different height than the coverage map which also contributes to this distance. For example if the transmitter is located 20m above the surface of the coverage map and a
min_distof 20m is selected, also positions directly below the transmitter are sampled.- Input:
num_pos (int) – Number of returned random positions for ech transmitter
metric (str, one of [“path_gain”, “rss”, “sinr”]) – Metric to be considered for sampling positions. Defaults to “path_gain”.
min_val_db (float | None) – Minimum value for the selected metric ([dB] for path gain and SINR; [dBm] for RSS). Positions are only sampled from cells where the selected metric is larger than or equal to this value. Ignored if None. Defaults to None.
max_val_db (float | None) – Maximum value for the selected metric ([dB] for path gain and SINR; [dBm] for RSS). Positions are only sampled from cells where the selected metric is smaller than or equal to this value. Ignored if None. Defaults to None.
min_dist (float | None) – Minimum distance [m] from transmitter for all random positions. Ignored if None. Defaults to None.
max_dist (float | None) – Maximum distance [m] from transmitter for all random positions. Ignored if None. Defaults to None.
tx_association (bool) – If True, only positions associated with a transmitter are chosen, i.e., positions where the chosen metric is the highest among all all transmitters. Else, a user located in a sampled position for a specific transmitter may perceive a higher metric from another TX. Defaults to True.
center_pos (bool) – If True, all returned positions are sampled from the cell center (i.e., the grid of the coverage map). Otherwise, the positions are randomly drawn from the surface of the cell. Defaults to False.
- Output:
[num_tx, num_pos, 3], tf.float – Random positions \((x,y,z)\) [m] that are in cells fulfilling the configured constraints
[num_tx, num_pos, 2], tf.float – Cell indices corresponding to the random positions
- show(metric='path_gain', tx=None, vmin=None, vmax=None, show_tx=True, show_rx=False, show_ris=False)[source]
Visualizes a coverage map
The position of the transmitter is indicated by a red “+” marker. The positions of the receivers are indicated by blue “x” markers. The positions of the RIS are indicated by black “*” markers.
- Input:
metric (str, one of [“path_gain”, “rss”, “sinr”]) – Metric to be shown. Defaults to “path_gain”.
tx (int | str | None) – Index or name of the transmitter for which to show the coverage map. If None, the maximum value over all transmitters for each cell is shown. Defaults to None.
vmin,vmax (float | None) – Define the range of values [dB] that the colormap covers. If set to None, the complete range is shown. Defaults to None.
show_tx (bool) – If set to True, then the position of the transmitters are shown. Defaults to True.
show_rx (bool) – If set to True, then the position of the receivers are shown. Defaults to False.
show_ris (bool) – If set to True, then the position of the RIS are shown. Defaults to False.
- Output:
Figure– Figure showing the coverage map
- show_association(metric='path_gain', show_tx=True, show_rx=False, show_ris=False)[source]
Visualizes cell-to-tx association for a given metric
The position of the transmitter is indicated by a red “+” marker. The positions of the receivers are indicated by blue “x” markers. The positions of the RIS are indicated by black “*” markers.
- Input:
metric (str, one of [“path_gain”, “rss”, “sinr”]) – Metric based on which the cell-to-tx association is computed. Defaults to “path_gain”.
show_tx (bool) – If set to True, then the position of the transmitters are shown. Defaults to True.
show_rx (bool) – If set to True, then the position of the receivers are shown. Defaults to False.
show_ris (bool) – If set to True, then the position of the RIS are shown. Defaults to False.
- Output:
Figure– Figure showing the cell-to-transmitter association
- property sinr
SINR across the coverage map from all transmitters
- Type:
[num_tx, num_cells_y, num_cells_x], tf.float
- property size
Size of the coverage map
- Type:
[2], tf.float
- property tx_pos
(column, row) cell index position of each transmitter
- Type:
[num_tx, 2], int
Cameras
A Camera defines a position and view direction
for rendering the scene.
The cameras property of the Scene
list all the cameras currently available for rendering. Cameras can be either
defined through the scene file or instantiated using the API.
The following code snippet shows how to load a scene and list the available
cameras:
scene = load_scene(sionna.rt.scene.munich)
print(scene.cameras)
scene.render("scene-cam-0") # Use the first camera of the scene for rendering
A new camera can be instantiated as follows:
cam = Camera("mycam", position=[200., 0.0, 50.])
scene.add(cam)
cam.look_at([0.0,0.0,0.0])
scene.render(cam) # Render using the Camera instance
scene.render("mycam") # or using the name of the camera
Camera
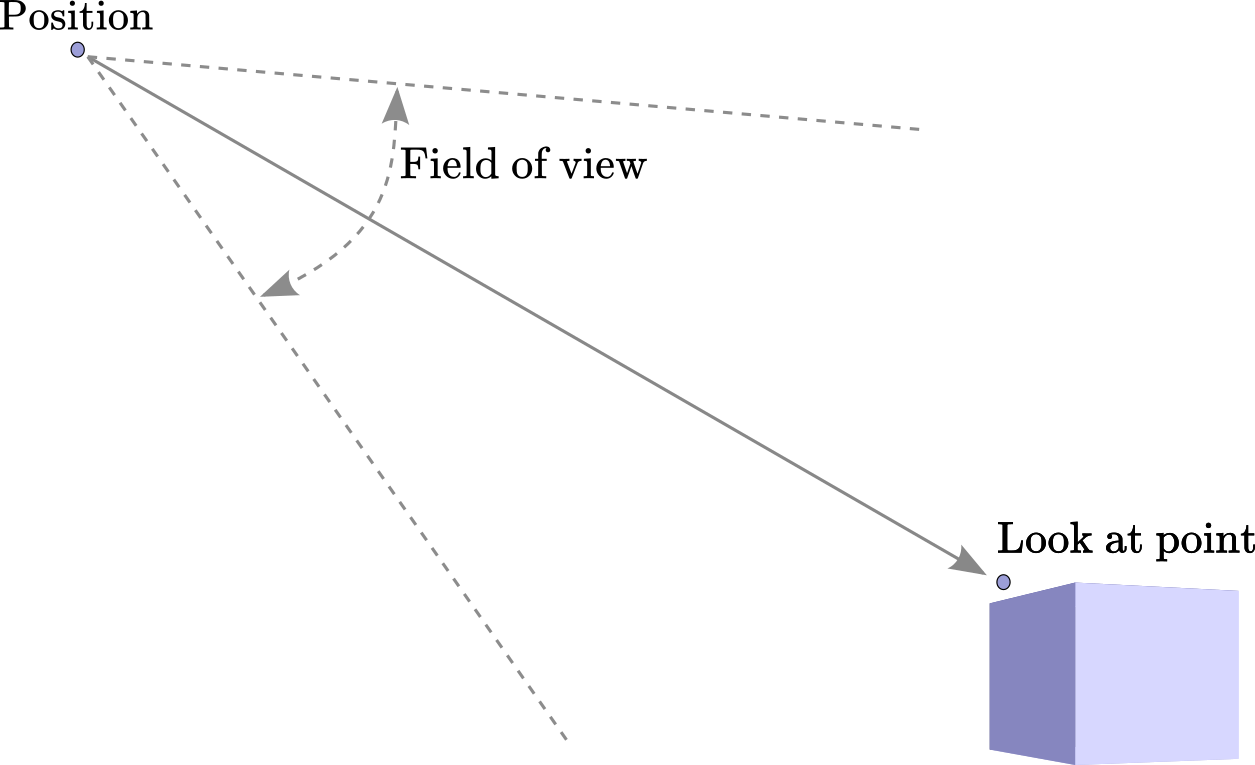
- class sionna.rt.Camera(name, position, orientation=[0., 0., 0.], look_at=None)[source]
A camera defines a position and view direction for rendering the scene.
In its local coordinate system, a camera looks toward the positive X-axis with the positive Z-axis being the upward direction.
- Input:
name (str) – Name. Cannot be “preview”, as it is reserved for the viewpoint of the interactive viewer.
position ([3], float) – Position \((x,y,z)\) [m] as three-dimensional vector
orientation ([3], float) – Orientation \((\alpha, \beta, \gamma)\) specified through three angles corresponding to a 3D rotation as defined in (3). This parameter is ignored if
look_atis not None. Defaults to [0,0,0].look_at ([3], float |
Transmitter|Receiver|RIS|Camera| None) – A position or the instance of aTransmitter,Receiver,RIS, orCamerato look at. If set to None, thenorientationis used to orientate the device.
- look_at(target)[source]
Sets the orientation so that the camera looks at a position, radio device, or another camera.
Given a point \(\mathbf{x}\in\mathbb{R}^3\) with spherical angles \(\theta\) and \(\varphi\), the orientation of the camera will be set equal to \((\varphi, \frac{\pi}{2}-\theta, 0.0)\).
- Input:
target ([3], float |
Transmitter|Receiver|Camera| str) – A position or the name or instance of aTransmitter,Receiver, orCamerain the scene to look at.
- property orientation
Get/set the orientation \((\alpha, \beta, \gamma)\) specified through three angles corresponding to a 3D rotation as defined in (3).
- Type:
[3], float
- property position
Get/set the position \((x,y,z)\) as three-dimensional vector
- Type:
[3], float
Scene Objects
A scene is made of scene objects. Examples include cars, trees,
buildings, furniture, etc.
A scene object is characterized by its geometry and material (RadioMaterial)
and implemented as an instance of the SceneObject class.
Scene objects are uniquely identified by their name.
To access a scene object, the get() method of
Scene may be used.
For example, the following code snippet shows how to load a scene and list its scene objects:
scene = load_scene(sionna.rt.scene.munich)
print(scene.objects)
To select an object, e.g., named “Schrannenhalle-itu_metal”, you can run:
my_object = scene.get("Schrannenhalle-itu_metal")
You can then set the RadioMaterial
of my_object as follows:
my_object.radio_material = "itu_wood"
Most scene objects names have postfixes of the form “-material_name”. These are used during loading of a scene
to assign a RadioMaterial to each of them. This tutorial video
explains how you can assign radio materials to objects when you create your own scenes.
SceneObject
- class sionna.rt.SceneObject[source]
Every object in the scene is implemented by an instance of this class
- look_at(target)[source]
Sets the orientation so that the x-axis points toward an
Object.- Input:
target ([3], float |
sionna.rt.Object| str) – A position or the name or instance of ansionna.rt.Objectin the scene to point toward to
- property name
Name
- Type:
str (read-only)
- property orientation
Get/set the orientation \((\alpha, \beta, \gamma)\) [rad] specified through three angles corresponding to a 3D rotation as defined in (3).
- Type:
[3], tf.float
- property position
Get/set the position vector [m] of the center of the object. The center is defined as the object’s axis-aligned bounding box (AABB).
- Type:
[3], tf.float
- property radio_material
Get/set the radio material of the object. Setting can be done by using either an instance of
RadioMaterialor the material name (str). If the radio material is not part of the scene, it will be added. This can raise an error if a different radio material with the same name was already added to the scene.- Type:
- property velocity
Get/set the velocity vector [m/s]
- Type:
[3], tf.float
Radio Materials
A RadioMaterial contains everything that is needed to enable the simulation
of the interaction of a radio wave with an object made of a particular material.
More precisely, it consists of the real-valued relative permittivity \(\varepsilon_r\),
the conductivity \(\sigma\), and the relative
permeability \(\mu_r\). For more details, see (7), (8), (9).
These quantities can possibly depend on the frequency of the incident radio
wave. Note that Sionna currently only allows non-magnetic materials with \(\mu_r=1\).
Additionally, a RadioMaterial can have an effective roughness (ER)
associated with it, leading to diffuse reflections (see, e.g., [Degli-Esposti11]).
The ER model requires a scattering coefficient \(S\in[0,1]\) (37),
a cross-polarization discrimination coefficient \(K_x\) (39), as well as a scattering pattern
\(f_\text{s}(\hat{\mathbf{k}}_\text{i}, \hat{\mathbf{k}}_\text{s})\) (40)–(42), such as the
LambertianPattern or DirectivePattern. The meaning of
these parameters is explained in Scattering.
Similarly to scene objects (SceneObject), all radio
materials are uniquely identified by their name.
For example, specifying that a scene object named “wall” is made of the
material named “itu-brick” is done as follows:
obj = scene.get("wall") # obj is a SceneObject
obj.radio_material = "itu_brick" # "wall" is made of "itu_brick"
Sionna provides the
ITU models of several materials whose properties
are automatically updated according to the configured frequency.
It is also possible to
define custom radio materials.
Radio materials provided with Sionna
Sionna provides the models of all of the materials defined in the ITU-R P.2040-2 recommendation [ITUR_P2040_2]. These models are based on curve fitting to measurement results and assume non-ionized and non-magnetic materials (\(\mu_r = 1\)). Frequency dependence is modeled by
where \(f_{\text{GHz}}\) is the frequency in GHz, and the constants
\(a\), \(b\), \(c\), and \(d\) characterize the material.
The table below provides their values which are used in Sionna
(from [ITUR_P2040_2]).
Note that the relative permittivity \(\varepsilon_r\) and
conductivity \(\sigma\) of all materials are updated automatically when
the frequency is set through the scene’s property frequency.
Moreover, by default, the scattering coefficient, \(S\), of these materials is set to
0, leading to no diffuse reflection.
Material name |
Real part of relative permittivity |
Conductivity [S/m] |
Frequency range (GHz) |
||
a |
b |
c |
d |
||
vacuum |
1 |
0 |
0 |
0 |
0.001 – 100 |
itu_concrete |
5.24 |
0 |
0.0462 |
0.7822 |
1 – 100 |
itu_brick |
3.91 |
0 |
0.0238 |
0.16 |
1 – 40 |
itu_plasterboard |
2.73 |
0 |
0.0085 |
0.9395 |
1 – 100 |
itu_wood |
1.99 |
0 |
0.0047 |
1.0718 |
0.001 – 100 |
itu_glass |
6.31 |
0 |
0.0036 |
1.3394 |
0.1 – 100 |
5.79 |
0 |
0.0004 |
1.658 |
220 – 450 |
|
itu_ceiling_board |
1.48 |
0 |
0.0011 |
1.0750 |
1 – 100 |
1.52 |
0 |
0.0029 |
1.029 |
220 – 450 |
|
itu_chipboard |
2.58 |
0 |
0.0217 |
0.7800 |
1 – 100 |
itu_plywood |
2.71 |
0 |
0.33 |
0 |
1 – 40 |
itu_marble |
7.074 |
0 |
0.0055 |
0.9262 |
1 – 60 |
itu_floorboard |
3.66 |
0 |
0.0044 |
1.3515 |
50 – 100 |
itu_metal |
1 |
0 |
\(10^7\) |
0 |
1 – 100 |
itu_very_dry_ground |
3 |
0 |
0.00015 |
2.52 |
1 – 10 |
itu_medium_dry_ground |
15 |
-0.1 |
0.035 |
1.63 |
1 – 10 |
itu_wet_ground |
30 |
-0.4 |
0.15 |
1.30 |
1 – 10 |
Defining custom radio materials
Custom radio materials can be implemented using the
RadioMaterial class by specifying a relative permittivity
\(\varepsilon_r\) and conductivity \(\sigma\), as well as optional
parameters related to diffuse scattering, such as the scattering coefficient \(S\),
cross-polarization discrimination coefficient \(K_x\), and scattering pattern \(f_\text{s}(\hat{\mathbf{k}}_\text{i}, \hat{\mathbf{k}}_\text{s})\).
Note that only non-magnetic materials with \(\mu_r=1\) are currently allowed.
The following code snippet shows how to create a custom radio material.
load_scene() # Load empty scene
custom_material = RadioMaterial("my_material",
relative_permittivity=2.0,
conductivity=5.0,
scattering_coefficient=0.3,
xpd_coefficient=0.1,
scattering_pattern=LambertianPattern())
It is also possible to define the properties of a material through a callback function that computes the material properties \((\varepsilon_r, \sigma)\) from the frequency:
def my_material_callback(f_hz):
relative_permittivity = compute_relative_permittivity(f_hz)
conductivity = compute_conductivity(f_hz)
return (relative_permittivity, conductivity)
custom_material = RadioMaterial("my_material",
frequency_update_callback=my_material_callback)
scene.add(custom_material)
Once defined, the custom material can be assigned to a SceneObject using its name:
obj = scene.get("my_object") # obj is a SceneObject
obj.radio_material = "my_material" # "my_object" is made of "my_material"
or the material instance:
obj = scene.get("my_object") # obj is a SceneObject
obj.radio_material = custom_material # "my_object" is made of "my_material"
The material parameters can be assigned to TensorFlow variables or tensors, such as the output of a Keras layer defining a neural network. This allows one to make materials trainable:
mat = RadioMaterial("my_mat",
relative_permittivity= tf.Variable(2.1, dtype=tf.float32))
mat.conductivity = tf.Variable(0.0, dtype=tf.float32)
RadioMaterial
- class sionna.rt.RadioMaterial(name, relative_permittivity=1.0, conductivity=0.0, scattering_coefficient=0.0, xpd_coefficient=0.0, scattering_pattern=None, frequency_update_callback=None, dtype=tf.complex64)[source]
Class implementing a radio material
A radio material is defined by its relative permittivity \(\varepsilon_r\) and conductivity \(\sigma\) (see (9)), as well as optional parameters related to diffuse scattering, such as the scattering coefficient \(S\), cross-polarization discrimination coefficient \(K_x\), and scattering pattern \(f_\text{s}(\hat{\mathbf{k}}_\text{i}, \hat{\mathbf{k}}_\text{s})\).
We assume non-ionized and non-magnetic materials, and therefore the permeability \(\mu\) of the material is assumed to be equal to the permeability of vacuum i.e., \(\mu_r=1.0\).
For frequency-dependent materials, it is possible to specify a callback function
frequency_update_callbackthat computes the material properties \((\varepsilon_r, \sigma)\) from the frequency. If a callback function is specified, the material properties cannot be set and the values specified at instantiation are ignored. The callback should return -1 for both the relative permittivity and the conductivity if these are not defined for the given carrier frequency.The material properties can be assigned to a TensorFlow variable or tensor. In the latter case, the tensor could be the output of a callable, such as a Keras layer implementing a neural network. In the former case, it could be set to a trainable variable:
mat = RadioMaterial("my_mat") mat.conductivity = tf.Variable(0.0, dtype=tf.float32)
- Parameters:
name (str) – Unique name of the material
relative_permittivity (float | None) – Relative permittivity of the material. Must be larger or equal to 1. Defaults to 1. Ignored if
frequency_update_callbackis provided.conductivity (float | None) – Conductivity of the material [S/m]. Must be non-negative. Defaults to 0. Ignored if
frequency_update_callbackis provided.scattering_coefficient (float) – Scattering coefficient \(S\in[0,1]\) as defined in (37). Defaults to 0.
xpd_coefficient (float) – Cross-polarization discrimination coefficient \(K_x\in[0,1]\) as defined in (39). Only relevant if
scattering_coefficient>0. Defaults to 0.scattering_pattern (ScatteringPattern) –
ScatteringPatternto be applied. Only relevant ifscattering_coefficient>0. Defaults to None, which implies aLambertianPattern.frequency_update_callback (callable | None) –
An optional callable object used to obtain the material parameters from the scene’s
frequency. This callable must take as input the frequency [Hz] and must return the material properties as a tuple:(relative_permittivity, conductivity).If set to None, the material properties are constant and equal to
relative_permittivityandconductivity. Defaults to None.dtype (tf.complex64 or tf.complex128) – Datatype. Defaults to tf.complex64.
- property complex_relative_permittivity
Complex relative permittivity \(\eta\) (9)
- Type:
tf.complex (read-only)
- property frequency_update_callback
Get/set frequency update callback function
- Type:
callable
- property is_used
Indicator if the material is used by at least one object of the scene
- Type:
bool
- property name
Name of the radio material
- Type:
str (read-only)
- property relative_permeability
Relative permeability \(\mu_r\) (8). Defaults to 1.
- Type:
tf.float (read-only)
- property relative_permittivity
Get/set the relative permittivity \(\varepsilon_r\) (9)
- Type:
tf.float
- property scattering_coefficient
Get/set the scattering coefficient \(S\in[0,1]\) (37).
- Type:
tf.float
- property scattering_pattern
Get/set the ScatteringPattern.
- Type:
ScatteringPattern
- property use_counter
Number of scene objects using this material
- Type:
int
- property using_objects
Identifiers of the objects using this material
- Type:
[num_using_objects], tf.int
- property well_defined
Get if the material is well-defined
- Type:
bool
ScatteringPattern
- class sionna.rt.LambertianPattern(dtype=tf.complex64)[source]
Lambertian scattering model from [Degli-Esposti07] as given in (40)
- Parameters:
dtype (tf.complex64 or tf.complex128) – Datatype used for all computations. Defaults to tf.complex64.
- Input:
k_i ([batch_size, 3], dtype.real_dtype) – Incoming directions
k_s ([batch_size,3], dtype.real_dtype) – Outgoing directions
- Output:
pattern ([batch_size], dtype.real_dtype) – Scattering pattern
Example
>>> LambertianPattern().visualize()
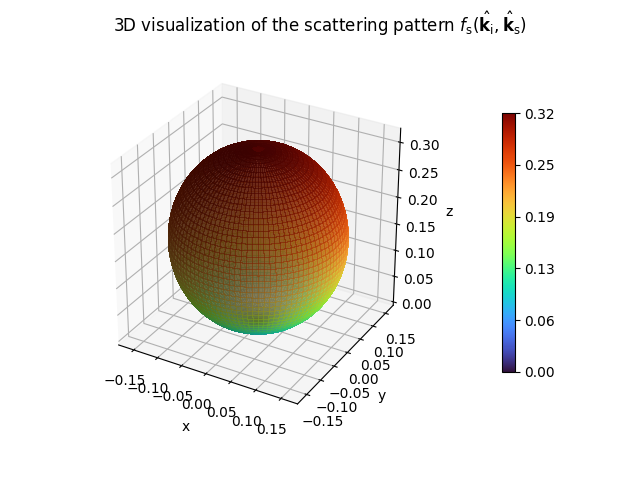
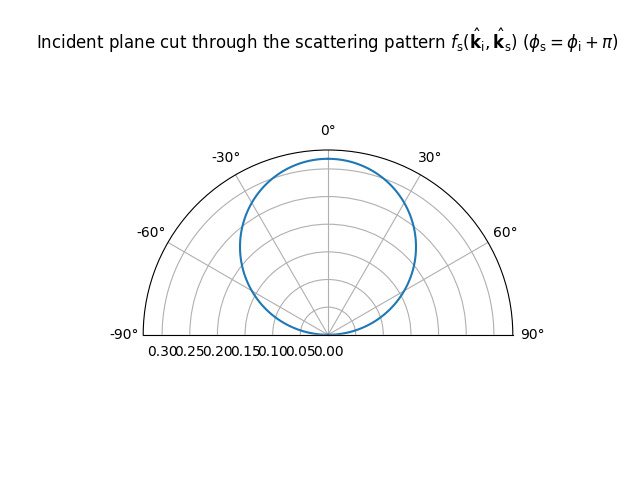
- visualize(k_i=(0.7071, 0.0, -0.7071), show_directions=False)
Visualizes the scattering pattern
It is assumed that the surface normal points toward the positive z-axis.
- Input:
k_i ([3], array_like) – Incoming direction
show_directions (bool) – If True, the incoming and specular reflection directions are shown. Defaults to False.
- Output:
matplotlib.pyplot.Figure– 3D visualization of the scattering patternmatplotlib.pyplot.Figure– Visualization of the incident plane cut through the scattering pattern
- class sionna.rt.DirectivePattern(alpha_r, dtype=tf.complex64)[source]
Directive scattering model from [Degli-Esposti07] as given in (41)
- Parameters:
alpha_r (int, [1,2,...]) – Parameter related to the width of the scattering lobe in the direction of the specular reflection.
dtype (tf.complex64 or tf.complex128) – Datatype used for all computations. Defaults to tf.complex64.
- Input:
k_i ([batch_size, 3], dtype.real_dtype) – Incoming directions
k_s ([batch_size,3], dtype.real_dtype) – Outgoing directions
- Output:
pattern ([batch_size], dtype.real_dtype) – Scattering pattern
Example
>>> DirectivePattern(alpha_r=10).visualize()
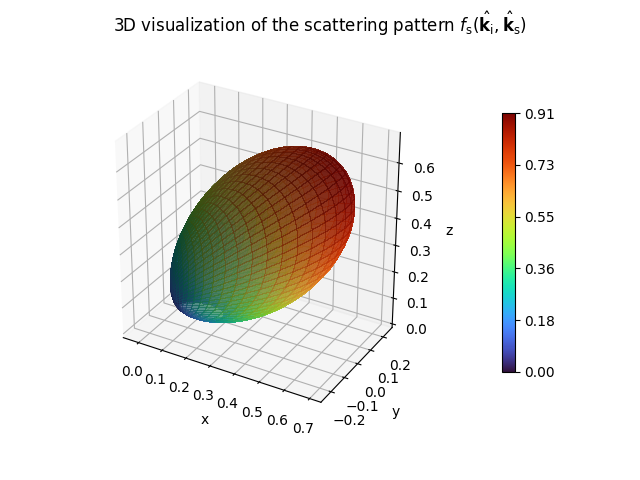
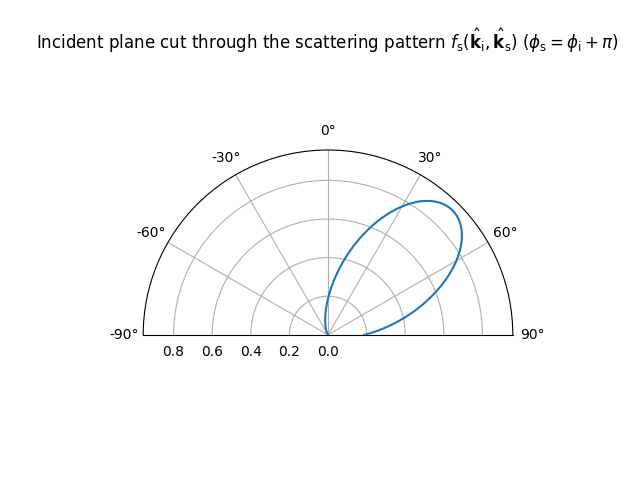
- property alpha_r
Get/set
alpha_r- Type:
bool
- visualize(k_i=(0.7071, 0.0, -0.7071), show_directions=False)
Visualizes the scattering pattern
It is assumed that the surface normal points toward the positive z-axis.
- Input:
k_i ([3], array_like) – Incoming direction
show_directions (bool) – If True, the incoming and specular reflection directions are shown. Defaults to False.
- Output:
matplotlib.pyplot.Figure– 3D visualization of the scattering patternmatplotlib.pyplot.Figure– Visualization of the incident plane cut through the scattering pattern
- class sionna.rt.BackscatteringPattern(alpha_r, alpha_i, lambda_, dtype=tf.complex64)[source]
Backscattering model from [Degli-Esposti07] as given in (42)
The parameter
lambda_can be assigned to a TensorFlow variable or tensor. In the latter case, the tensor can be the output of a callable, such as a Keras layer implementing a neural network. In the former case, it can be set to a trainable variable:sp = BackscatteringPattern(alpha_r=3, alpha_i=5, lambda_=tf.Variable(0.3, dtype=tf.float32))
- Parameters:
alpha_r (int, [1,2,...]) – Parameter related to the width of the scattering lobe in the direction of the specular reflection.
alpha_i (int, [1,2,...]) – Parameter related to the width of the scattering lobe in the incoming direction.
lambda (float, [0,1]) – Parameter determining the percentage of the diffusely reflected energy in the lobe around the specular reflection.
dtype (tf.complex64 or tf.complex128) – Datatype used for all computations. Defaults to tf.complex64.
- Input:
k_i ([batch_size, 3], dtype.real_dtype) – Incoming directions
k_s ([batch_size,3], dtype.real_dtype) – Outgoing directions
- Output:
pattern ([batch_size], dtype.real_dtype) – Scattering pattern
Example
>>> BackscatteringPattern(alpha_r=20, alpha_i=30, lambda_=0.7).visualize()
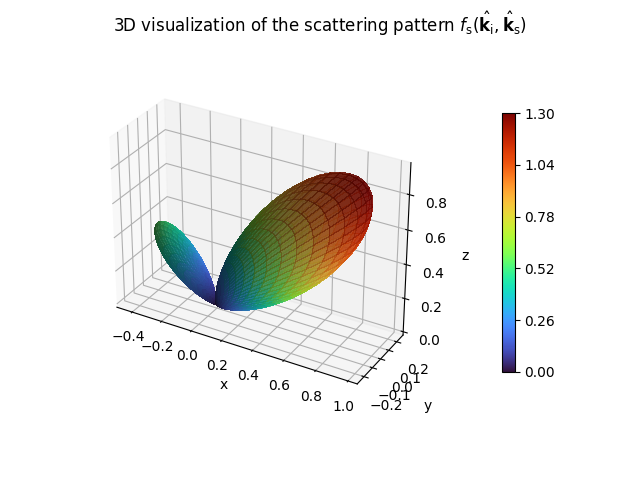
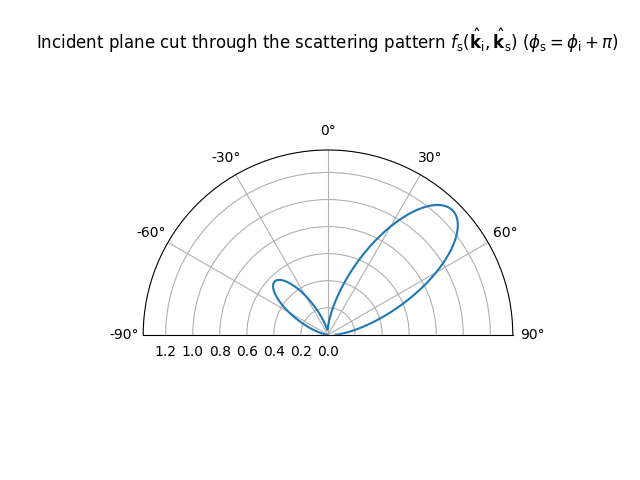
- property alpha_i
Get/set
alpha_i- Type:
bool
- property alpha_r
Get/set
alpha_r- Type:
bool
- property lambda_
Get/set
lambda_- Type:
bool
- visualize(k_i=(0.7071, 0.0, -0.7071), show_directions=False)
Visualizes the scattering pattern
It is assumed that the surface normal points toward the positive z-axis.
- Input:
k_i ([3], array_like) – Incoming direction
show_directions (bool) – If True, the incoming and specular reflection directions are shown. Defaults to False.
- Output:
matplotlib.pyplot.Figure– 3D visualization of the scattering patternmatplotlib.pyplot.Figure– Visualization of the incident plane cut through the scattering pattern
Radio Devices
A radio device refers to a Transmitter or Receiver equipped
with an AntennaArray as specified by the Scene’s properties
tx_array and rx_array, respectively. Also
reconfigurable intelligent surfaces (RIS) inherit from this class.
The following code snippet shows how to instantiate a Transmitter
equipped with a \(4 \times 2\) PlanarArray with cross-polarized isotropic antennas:
scene.tx_array = PlanarArray(num_rows=4,
num_cols=2,
vertical_spacing=0.5,
horizontal_spacing=0.5,
pattern="iso",
polarization="cross")
my_tx = Transmitter(name="my_tx",
position=(0,0,0),
orientation=(0,0,0))
scene.add(my_tx)
The position \((x,y,z)\) and orientation \((\alpha, \beta, \gamma)\) of a radio device can be freely configured. The latter is specified through three angles corresponding to a 3D rotation as defined in (3). Both can be assigned to TensorFlow variables or tensors. In the latter case, the tensor can be the output of a callable, such as a Keras layer implementing a neural network. In the former case, it can be set to a trainable variable.
Radio devices need to be explicitly added to the scene using the scene’s method add()
and can be removed from it using remove():
scene = load_scene()
scene.add(Transmitter("tx", [10.0, 0.0, 1.5], [0.0,0.0,0.0]))
scene.remove("tx")
Transmitter
- class sionna.rt.Transmitter(name, position, orientation=(0.0, 0.0, 0.0), look_at=None, power_dbm=44, color=(0.16, 0.502, 0.725), dtype=tf.complex64)[source]
Class defining a transmitter
The
position,orientation, andpower_dbmproperties can be assigned to a TensorFlow variable or tensor. In the latter case, the tensor can be the output of a callable, such as a Keras layer implementing a neural network. In the former case, it can be set to a trainable variable:tx = Transmitter(name="my_tx", position=tf.Variable([0, 0, 0], dtype=tf.float32), orientation=tf.Variable([0, 0, 0], dtype=tf.float32), power_dbm=tf.Variable(44, dtype=tf.float32))
- Parameters:
name (str) – Name
position ([3], float) – Position \((x,y,z)\) [m] as three-dimensional vector
power_dbm (float) – Transmit power [dBm]
orientation ([3], float) – Orientation \((\alpha, \beta, \gamma)\) [rad] specified through three angles corresponding to a 3D rotation as defined in (3). This parameter is ignored if
look_atis not None. Defaults to [0,0,0].look_at ([3], float |
Transmitter|Receiver|RIS|Camera| None) – A position or the instance of aTransmitter,Receiver,RIS, orCamerato look at. If set to None, thenorientationis used to orientate the device.color ([3], float) – Defines the RGB (red, green, blue)
colorparameter for the device as displayed in the previewer and renderer. Each RGB component must have a value within the range \(\in [0,1]\). Defaults to [0.160, 0.502, 0.725].dtype (tf.complex) – Datatype to be used in internal calculations. Defaults to tf.complex64.
- property color
Get/set the the RGB (red, green, blue) color for the device as displayed in the previewer and renderer. Each RGB component must have a value within the range \(\in [0,1]\).
- Type:
[3], float
- look_at(target)
Sets the orientation so that the x-axis points toward a position, radio device, RIS, or camera.
Given a point \(\mathbf{x}\in\mathbb{R}^3\) with spherical angles \(\theta\) and \(\varphi\), the orientation of the radio device will be set equal to \((\varphi, \frac{\pi}{2}-\theta, 0.0)\).
- Input:
target ([3], float |
Transmitter|Receiver|RIS|Camera| str) – A position or the name or instance of aTransmitter,Receiver,RIS, orCamerain the scene to look at.
- property name
Name
- Type:
str (read-only)
- property orientation
Get/set the orientation
- Type:
[3], tf.float
- property position
Get/set the position
- Type:
[3], tf.float
- property power
Get the transmit power [W]
- Type:
tf.float
- property power_dbm
Get/set transmit power [dBm]
- Type:
tf.float
Receiver
- class sionna.rt.Receiver(name, position, orientation=(0.0, 0.0, 0.0), look_at=None, color=(0.153, 0.682, 0.375), dtype=tf.complex64)[source]
Class defining a receiver
The
positionandorientationproperties can be assigned to a TensorFlow variable or tensor. In the latter case, the tensor can be the output of a callable, such as a Keras layer implementing a neural network. In the former case, it can be set to a trainable variable:rx = Transmitter(name="my_rx", position=tf.Variable([0, 0, 0], dtype=tf.float32), orientation=tf.Variable([0, 0, 0], dtype=tf.float32))
- Parameters:
name (str) – Name
position ([3], float) – Position \((x,y,z)\) as three-dimensional vector
orientation ([3], float) – Orientation \((\alpha, \beta, \gamma)\) [rad] specified through three angles corresponding to a 3D rotation as defined in (3). This parameter is ignored if
look_atis not None. Defaults to [0,0,0].look_at ([3], float |
Transmitter|Receiver|RIS|Camera| None) – A position or the instance of aTransmitter,Receiver,RIS, orCamerato look at. If set to None, thenorientationis used to orientate the device.color ([3], float) – Defines the RGB (red, green, blue)
colorparameter for the device as displayed in the previewer and renderer. Each RGB component must have a value within the range \(\in [0,1]\). Defaults to [0.153, 0.682, 0.375].dtype (tf.complex) – Datatype to be used in internal calculations. Defaults to tf.complex64.
- property color
Get/set the the RGB (red, green, blue) color for the device as displayed in the previewer and renderer. Each RGB component must have a value within the range \(\in [0,1]\).
- Type:
[3], float
- look_at(target)
Sets the orientation so that the x-axis points toward a position, radio device, RIS, or camera.
Given a point \(\mathbf{x}\in\mathbb{R}^3\) with spherical angles \(\theta\) and \(\varphi\), the orientation of the radio device will be set equal to \((\varphi, \frac{\pi}{2}-\theta, 0.0)\).
- Input:
target ([3], float |
Transmitter|Receiver|RIS|Camera| str) – A position or the name or instance of aTransmitter,Receiver,RIS, orCamerain the scene to look at.
- property name
Name
- Type:
str (read-only)
- property orientation
Get/set the orientation
- Type:
[3], tf.float
- property position
Get/set the position
- Type:
[3], tf.float
Antenna Arrays
Transmitters (Transmitter) and receivers (Receiver) are equipped with an AntennaArray that is composed of one or more antennas. All transmitters and all receivers share the same AntennaArray which can be set through the scene properties tx_array and rx_array, respectively.
AntennaArray
- class sionna.rt.AntennaArray(antenna, positions, dtype=tf.complex64)[source]
Class implementing an antenna array
An antenna array is composed of identical antennas that are placed at different positions. The
positionsparameter can be assigned to a TensorFlow variable or tensor.array = AntennaArray(antenna=Antenna("tr38901", "V"), positions=tf.Variable([[0,0,0], [0, 1, 1]]))
- Parameters:
antenna (
Antenna) – Antenna instancepositions ([array_size, 3], array_like) – Array of relative positions \((x,y,z)\) [m] of each antenna (dual-polarized antennas are counted as a single antenna and share the same position). The absolute position of the antennas is obtained by adding the position of the
TransmitterorReceiverusing it.dtype (tf.complex64 or tf.complex128) – Data type used for all computations. Defaults to tf.complex64.
- property array_size
Number of antennas in the array. Dual-polarized antennas are counted as a single antenna.
- Type:
int (read-only)
- property num_ant
Number of linearly polarized antennas in the array. Dual-polarized antennas are counted as two linearly polarized antennas.
- Type:
int (read-only)
- property positions
Get/set array of relative positions \((x,y,z)\) [m] of each antenna (dual-polarized antennas are counted as a single antenna and share the same position).
- Type:
[array_size, 3], tf.float
- rotated_positions(orientation)[source]
Get the antenna positions rotated according to
orientation- Input:
orientation ([3], tf.float) – Orientation \((\alpha, \beta, \gamma)\) [rad] specified through three angles corresponding to a 3D rotation as defined in (3).
- Output:
[array_size, 3] – Rotated positions
PlanarArray
- class sionna.rt.PlanarArray(num_rows, num_cols, vertical_spacing, horizontal_spacing, pattern, polarization=None, polarization_model=2, dtype=tf.complex64)[source]
Class implementing a planar antenna array
The antennas are regularly spaced, located in the y-z plane, and numbered column-first from the top-left to bottom-right corner.
- Parameters:
num_rows (int) – Number of rows
num_cols (int) – Number of columns
vertical_spacing (float) – Vertical antenna spacing [multiples of wavelength].
horizontal_spacing (float) – Horizontal antenna spacing [multiples of wavelength].
pattern (str, callable, or length-2 sequence of callables) – Antenna pattern. Either one of [“iso”, “dipole”, “hw_dipole”, “tr38901”], or a callable, or a length-2 sequence of callables defining antenna patterns. In the latter case, the antennas are dual polarized and each callable defines the antenna pattern in one of the two orthogonal polarization directions. An antenna pattern is a callable that takes as inputs vectors of zenith and azimuth angles of the same length and returns for each pair the corresponding zenith and azimuth patterns. See (14) for more detail.
polarization (str or None) – Type of polarization. For single polarization, must be “V” (vertical) or “H” (horizontal). For dual polarization, must be “VH” or “cross”. Only needed if
patternis a string.polarization_model (int, one of [1,2]) – Polarization model to be used. Options 1 and 2 refer to
polarization_model_1()andpolarization_model_2(), respectively. Defaults to 2.dtype (tf.complex64 or tf.complex128) – Datatype used for all computations. Defaults to tf.complex64.
Example
array = PlanarArray(8,4, 0.5, 0.5, "tr38901", "VH") array.show()
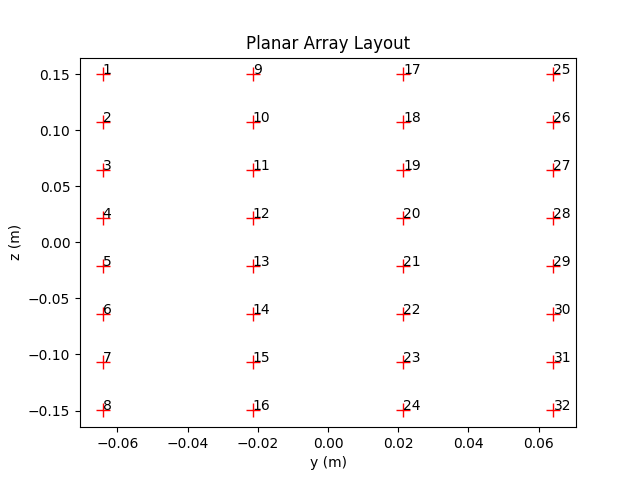
- property array_size
Number of antennas in the array. Dual-polarized antennas are counted as a single antenna.
- Type:
int (read-only)
- property num_ant
Number of linearly polarized antennas in the array. Dual-polarized antennas are counted as two linearly polarized antennas.
- Type:
int (read-only)
- property positions
Get/set array of relative positions \((x,y,z)\) [m] of each antenna (dual-polarized antennas are counted as a single antenna and share the same position).
- Type:
[array_size, 3], tf.float
Antennas
We refer the user to the section “Far Field of a Transmitting Antenna” for various useful definitions and background on antenna modeling.
An Antenna can be single- or dual-polarized and has for each polarization direction a possibly different antenna pattern.
An antenna pattern is defined as a function \(f:(\theta,\varphi)\mapsto (C_\theta(\theta, \varphi), C_\varphi(\theta, \varphi))\) that maps a pair of zenith and azimuth angles to zenith and azimuth pattern values. You can easily define your own pattern or use one of the predefined patterns below.
Transmitters (Transmitter) and receivers (Receiver) are not equipped with an Antenna but an AntennaArray that is composed of one or more antennas. All transmitters in a scene share the same AntennaArray which can be set through the scene property tx_array. The same holds for all receivers whose AntennaArray can be set through rx_array.
Antenna
- class sionna.rt.Antenna(pattern, polarization=None, polarization_model=2, dtype=tf.complex64)[source]
Class implementing an antenna
Creates an antenna object with an either predefined or custom antenna pattern. Can be single or dual polarized.
- Parameters:
pattern (str, callable, or length-2 sequence of callables) – Antenna pattern. Either one of [“iso”, “dipole”, “hw_dipole”, “tr38901”], or a callable, or a length-2 sequence of callables defining antenna patterns. In the latter case, the antenna is dual polarized and each callable defines the antenna pattern in one of the two orthogonal polarization directions. An antenna pattern is a callable that takes as inputs vectors of zenith and azimuth angles of the same length and returns for each pair the corresponding zenith and azimuth patterns.
polarization (str or None) – Type of polarization. For single polarization, must be “V” (vertical) or “H” (horizontal). For dual polarization, must be “VH” or “cross”. Only needed if
patternis a string.polarization_model (int, one of [1,2]) – Polarization model to be used. Options 1 and 2 refer to
polarization_model_1()andpolarization_model_2(), respectively. Defaults to 2.dtype (tf.complex64 or tf.complex128) – Datatype used for all computations. Defaults to tf.complex64.
Example
>>> Antenna("tr38901", "VH")
- property patterns
Antenna patterns for one or two polarization directions
- Type:
list, callable
compute_gain
- sionna.rt.antenna.compute_gain(pattern)[source]
Computes the directivity, gain, and radiation efficiency of an antenna pattern
Given a function \(f:(\theta,\varphi)\mapsto (C_\theta(\theta, \varphi), C_\varphi(\theta, \varphi))\) describing an antenna pattern (14), this function computes the gain \(G\), directivity \(D\), and radiation efficiency \(\eta_\text{rad}=G/D\) (see (12) and text below).
- Input:
pattern (callable) – A callable that takes as inputs vectors of zenith and azimuth angles of the same length and returns for each pair the corresponding zenith and azimuth patterns.
- Output:
D (float) – Directivity \(D\)
G (float) – Gain \(G\)
eta_rad (float) – Radiation efficiency \(\eta_\text{rad}\)
Examples
>>> compute_gain(tr38901_pattern) (<tf.Tensor: shape=(), dtype=float32, numpy=9.606758>, <tf.Tensor: shape=(), dtype=float32, numpy=6.3095527>, <tf.Tensor: shape=(), dtype=float32, numpy=0.65678275>)
visualize
- sionna.rt.antenna.visualize(pattern)[source]
Visualizes an antenna pattern
This function visualizes an antenna pattern with the help of three figures showing the vertical and horizontal cuts as well as a three-dimensional visualization of the antenna gain.
- Input:
pattern (callable) – A callable that takes as inputs vectors of zenith and azimuth angles of the same length and returns for each pair the corresponding zenith and azimuth patterns.
- Output:
matplotlib.pyplot.Figure– Vertical cut of the antenna gainmatplotlib.pyplot.Figure– Horizontal cut of the antenna gainmatplotlib.pyplot.Figure– 3D visualization of the antenna gain
Examples
>>> fig_v, fig_h, fig_3d = visualize(hw_dipole_pattern)
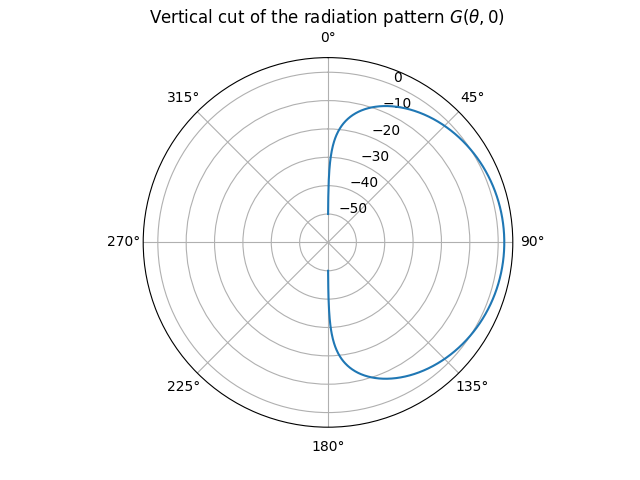
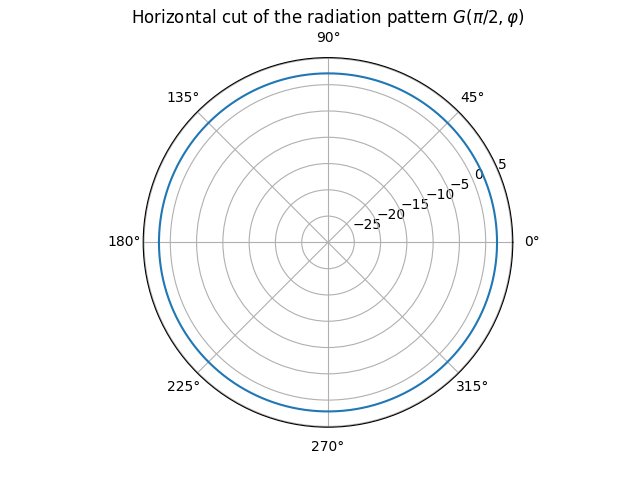
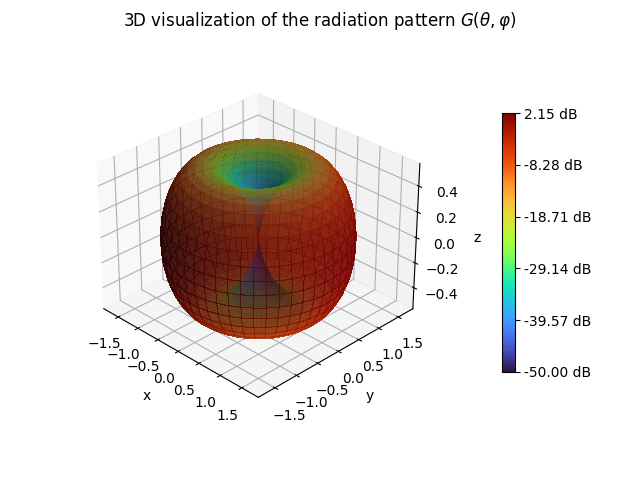
dipole_pattern
- sionna.rt.antenna.dipole_pattern(theta, phi, slant_angle=0.0, polarization_model=2, dtype=tf.complex64)[source]
Short dipole pattern with linear polarizarion (Eq. 4-26a) [Balanis97]
- Input:
theta (array_like, float) – Zenith angles wrapped within [0,pi] [rad]
phi (array_like, float) – Azimuth angles wrapped within [-pi, pi) [rad]
slant_angle (float) – Slant angle of the linear polarization [rad]. A slant angle of zero means vertical polarization.
polarization_model (int, one of [1,2]) – Polarization model to be used. Options 1 and 2 refer to
polarization_model_1()andpolarization_model_2(), respectively. Defaults to 2.dtype (tf.complex64 or tf.complex128) – Datatype. Defaults to tf.complex64.
- Output:
c_theta (array_like, complex) – Zenith pattern
c_phi (array_like, complex) – Azimuth pattern
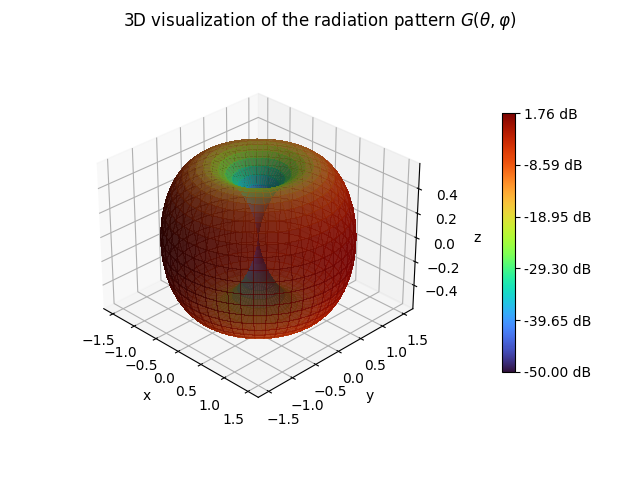
hw_dipole_pattern
- sionna.rt.antenna.hw_dipole_pattern(theta, phi, slant_angle=0.0, polarization_model=2, dtype=tf.complex64)[source]
Half-wavelength dipole pattern with linear polarizarion (Eq. 4-84) [Balanis97]
- Input:
theta (array_like, float) – Zenith angles wrapped within [0,pi] [rad]
phi (array_like, float) – Azimuth angles wrapped within [-pi, pi) [rad]
slant_angle (float) – Slant angle of the linear polarization [rad]. A slant angle of zero means vertical polarization.
polarization_model (int, one of [1,2]) – Polarization model to be used. Options 1 and 2 refer to
polarization_model_1()andpolarization_model_2(), respectively. Defaults to 2.dtype (tf.complex64 or tf.complex128) – Datatype. Defaults to tf.complex64.
- Output:
c_theta (array_like, complex) – Zenith pattern
c_phi (array_like, complex) – Azimuth pattern
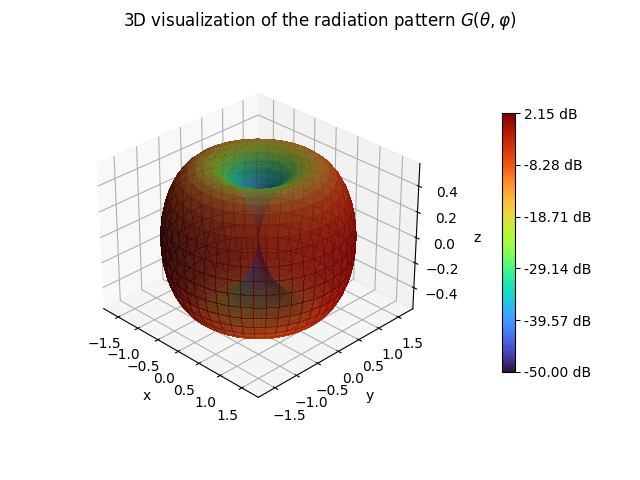
iso_pattern
- sionna.rt.antenna.iso_pattern(theta, phi, slant_angle=0.0, polarization_model=2, dtype=tf.complex64)[source]
Isotropic antenna pattern with linear polarizarion
- Input:
theta (array_like, float) – Zenith angles wrapped within [0,pi] [rad]
phi (array_like, float) – Azimuth angles wrapped within [-pi, pi) [rad]
slant_angle (float) – Slant angle of the linear polarization [rad]. A slant angle of zero means vertical polarization.
polarization_model (int, one of [1,2]) – Polarization model to be used. Options 1 and 2 refer to
polarization_model_1()andpolarization_model_2(), respectively. Defaults to 2.dtype (tf.complex64 or tf.complex128) – Datatype. Defaults to tf.complex64.
- Output:
c_theta (array_like, complex) – Zenith pattern
c_phi (array_like, complex) – Azimuth pattern
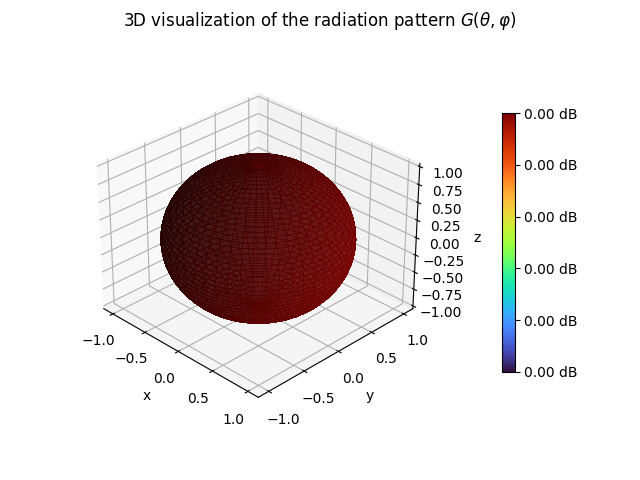
tr38901_pattern
- sionna.rt.antenna.tr38901_pattern(theta, phi, slant_angle=0.0, polarization_model=2, dtype=tf.complex64)[source]
Antenna pattern from 3GPP TR 38.901 (Table 7.3-1) [TR38901]
- Input:
theta (array_like, float) – Zenith angles wrapped within [0,pi] [rad]
phi (array_like, float) – Azimuth angles wrapped within [-pi, pi) [rad]
slant_angle (float) – Slant angle of the linear polarization [rad]. A slant angle of zero means vertical polarization.
polarization_model (int, one of [1,2]) – Polarization model to be used. Options 1 and 2 refer to
polarization_model_1()andpolarization_model_2(), respectively. Defaults to 2.dtype (tf.complex64 or tf.complex128) – Datatype. Defaults to tf.complex64.
- Output:
c_theta (array_like, complex) – Zenith pattern
c_phi (array_like, complex) – Azimuth pattern
polarization_model_1
- sionna.rt.antenna.polarization_model_1(c_theta, theta, phi, slant_angle)[source]
Model-1 for polarized antennas from 3GPP TR 38.901
Transforms a vertically polarized antenna pattern \(\tilde{C}_\theta(\theta, \varphi)\) into a linearly polarized pattern whose direction is specified by a slant angle \(\zeta\). For example, \(\zeta=0\) and \(\zeta=\pi/2\) correspond to vertical and horizontal polarization, respectively, and \(\zeta=\pm \pi/4\) to a pair of cross polarized antenna elements.
The transformed antenna pattern is given by (7.3-3) [TR38901]:
\[\begin{split}\begin{align} \begin{bmatrix} C_\theta(\theta, \varphi) \\ C_\varphi(\theta, \varphi) \end{bmatrix} &= \begin{bmatrix} \cos(\psi) \\ \sin(\psi) \end{bmatrix} \tilde{C}_\theta(\theta, \varphi)\\ \cos(\psi) &= \frac{\cos(\zeta)\sin(\theta)+\sin(\zeta)\sin(\varphi)\cos(\theta)}{\sqrt{1-\left(\cos(\zeta)\cos(\theta)-\sin(\zeta)\sin(\varphi)\sin(\theta)\right)^2}} \\ \sin(\psi) &= \frac{\sin(\zeta)\cos(\varphi)}{\sqrt{1-\left(\cos(\zeta)\cos(\theta)-\sin(\zeta)\sin(\varphi)\sin(\theta)\right)^2}} \end{align}\end{split}\]- Input:
c_tilde_theta (array_like, complex) – Zenith pattern
theta (array_like, float) – Zenith angles wrapped within [0,pi] [rad]
phi (array_like, float) – Azimuth angles wrapped within [-pi, pi) [rad]
slant_angle (float) – Slant angle of the linear polarization [rad]. A slant angle of zero means vertical polarization.
- Output:
c_theta (array_like, complex) – Zenith pattern
c_phi (array_like, complex) – Azimuth pattern
polarization_model_2
- sionna.rt.antenna.polarization_model_2(c, slant_angle)[source]
Model-2 for polarized antennas from 3GPP TR 38.901
Transforms a vertically polarized antenna pattern \(\tilde{C}_\theta(\theta, \varphi)\) into a linearly polarized pattern whose direction is specified by a slant angle \(\zeta\). For example, \(\zeta=0\) and \(\zeta=\pi/2\) correspond to vertical and horizontal polarization, respectively, and \(\zeta=\pm \pi/4\) to a pair of cross polarized antenna elements.
The transformed antenna pattern is given by (7.3-4/5) [TR38901]:
\[\begin{split}\begin{align} \begin{bmatrix} C_\theta(\theta, \varphi) \\ C_\varphi(\theta, \varphi) \end{bmatrix} &= \begin{bmatrix} \cos(\zeta) \\ \sin(\zeta) \end{bmatrix} \tilde{C}_\theta(\theta, \varphi) \end{align}\end{split}\]- Input:
c_tilde_theta (array_like, complex) – Zenith pattern
slant_angle (float) – Slant angle of the linear polarization [rad]. A slant angle of zero means vertical polarization.
- Output:
c_theta (array_like, complex) – Zenith pattern
c_phi (array_like, complex) – Azimuth pattern
Reconfigurable Intelligent Surfaces (RIS)
RIS
- class sionna.rt.RIS(name, position, num_rows, num_cols, num_modes=1, orientation=(0.0, 0.0, 0.0), velocity=(0.0, 0.0, 0.0), look_at=None, color=(0.862, 0.078, 0.235), dtype=tf.complex64)[source]
Class defining a reconfigurable intelligent surface (RIS)
A RIS consists of a planar arrangement of unit cells with \(\lambda/2\) spacing. It’s
PhaseProfile\(\chi_m\) andAmplitudeProfile\(A_m\) can be configured after the RIS is instantiated. Both together define the spatial modulation coefficient \(\Gamma\) which determines how the RIS reflects electro-magnetic waves.See Reconfigurable Intelligent Surfaces (RIS) in the Primer on Electromagnetics for more details or have a look at the tutorial notebook.
An RIS instance is a callable that computes the spatial modulation coefficient and gradients/Hessians of the underlying phase profile for provided points on the RIS’ surface.
- Parameters:
name (str) – Name
position ([3], float) – Position \((x,y,z)\) as three-dimensional vector
num_rows (int) – Number of rows. Must at least be equal to three.
num_cols (int) – Number of columns. Must at least be equal to three.
num_modes (int) – Number of reradiation modes. Defaults to 1.
orientation ([3], float) – Orientation \((\alpha, \beta, \gamma)\) specified through three angles corresponding to a 3D rotation as defined in (3). This parameter is ignored if
look_atis not None. Defaults to [0,0,0]. In this case, the normal vector of the RIS points towards the positive x-axis.velocity ([3], float) – Velocity vector [m/s]. Used for the computation of path-specific Doppler shifts.
look_at ([3], float |
Transmitter|Receiver|RIS|Camera| None) – A position or the instance of aTransmitter,Receiver,RIS, orCamerato look at. If set to None, thenorientationis used to orientate the device.color ([3], float) – Defines the RGB (red, green, blue)
colorparameter for the device as displayed in the previewer and renderer. Each RGB component must have a value within the range \(\in [0,1]\). Defaults to [0.862,0.078,0.235].dtype (tf.complex) – Datatype to be used in internal calculations. Defaults to tf.complex64.
- Input:
points (tf.float, [num_samples, 2]) – Tensor of 2D coordinates defining the points on the RIS at which the spatial modulation profile should be evaluated. Defaults to None. In this case, the values for all unit cells are returned.
mode (int | None) – Reradiation mode to be considered. Defaults to None. In this case, the values for all modes are returned.
return_grads (bool) – If True, also the first- and second-order derivatives are returned. Defaults to False.
- Output:
gamma ([num_modes, num_samples] or [num_samples], tf.complex) – Spatial modulation coefficient at the sample positions
grads ([num_modes, num_samples, 3] or [num_samples, 3], tf.float) – Gradients of the interpolated phase profile values at the sample positions. Only returned if return_grads is True.
hessians ([num_modes, num_samples, 3, 3] or [num_samples, 3, 3] , tf.float) – Hessians of the interpolated phase profile values at the sample positions. Only returned if return_grads is True.
- property amplitude_profile
Set/get amplitude profile
- Type:
- property cell_positions
Cell positions in the local coordinate system (LCS) of the RIS, ordered from top-to-bottom left-to-right.
- Type:
[num_cells, 2], tf.float
- property cell_world_positions
Cell positions in the global coordinate system (GCS) of the RIS, ordered from top-to-bottom left-to-right.
- Type:
[num_cells, 3], tf.float
- property color
Get/set the the RGB (red, green, blue) color for the device as displayed in the previewer and renderer. Each RGB component must have a value within the range \(\in [0,1]\).
- Type:
[3], float
- focusing_lens(sources, targets)[source]
Configures the RIS as focusing lens
The phase profile is configured in such a way that the fields of all rays add up coherently at a specific point. In other words, the phase profile undoes the distance-based phase shift of every ray connecting a source to a target via a specific unit cell.
For a source and target at positions \(\mathbf{s}\) and \(\mathbf{t}\), the phase \(\chi_m(\mathbf{x})\) of a unit cell located at \(\mathbf{x}\) is computed as (e.g., Sec. IV-2 [Degli-Esposti22])
\[\chi_m(\mathbf{x}) = k_0 \left(\lVert\mathbf{s}-\mathbf{x}\rVert + \lVert\mathbf{s}-\mathbf{t}\rVert\right).\]Multiple reradiation modes can be configured.
The amplitude profile is set to one everywhere with a uniform relative power allocation across modes.
- Input:
sources (tf.float, [3] or [num_modes, 3]) – Tensor defining for every reradiation mode a source from which the incoming wave originates.
targets (tf.float, [3] or [num_modes, 3]) – Tensor defining for every reradiation mode a target towards which the incoming wave should be reflected.
- look_at(target)
Sets the orientation so that the x-axis points toward a position, radio device, RIS, or camera.
Given a point \(\mathbf{x}\in\mathbb{R}^3\) with spherical angles \(\theta\) and \(\varphi\), the orientation of the radio device will be set equal to \((\varphi, \frac{\pi}{2}-\theta, 0.0)\).
- Input:
target ([3], float |
Transmitter|Receiver|RIS|Camera| str) – A position or the name or instance of aTransmitter,Receiver,RIS, orCamerain the scene to look at.
- property name
Name
- Type:
str (read-only)
- property num_cells
Number of cells
- Type:
int
- property num_cols
Number of columns
- Type:
int
- property num_modes
Number of reradiation modes
- Type:
int
- property num_rows
Number of rows
- Type:
int
- property orientation
Get/set the orientation
- Type:
[3], tf.float
- phase_gradient_reflector(sources, targets)[source]
Configures the RIS as ideal phase gradient reflector
For an incoming direction \(\hat{\mathbf{k}}_i\) and desired outgoing direction \(\hat{\mathbf{k}}_r\), the necessary phase gradient along the RIS with normal \(\hat{\mathbf{n}}\) can be computed as (e.g., Eq.(12) [Vitucci24]):
\[\nabla\chi_m = k_0\left( \mathbf{I}- \hat{\mathbf{n}}\hat{\mathbf{n}}^\textsf{T} \right) \left(\hat{\mathbf{k}}_i - \hat{\mathbf{k}}_r \right).\]The phase profile is obtained by assigning zero phase to the first unit cell and evolving the other phases linearly according to the gradient across the entire RIS.
Multiple reradiation modes can be configured.
The amplitude profile is set to one everywhere with a uniform relative power allocation across modes.
- Input:
sources (tf.float, [3] or [num_modes, 3]) – Tensor defining for every reradiation mode a source from which the incoming wave originates.
targets (tf.float, [3] or [num_modes, 3]) – Tensor defining for every reradiation mode a target towards which the incoming wave should be reflected.
- property phase_profile
Set/get phase profile
- Type:
- property position
Get/set the position
- Type:
[3], tf.float
- property size
Size of the RIS (width, height) [m]
- Type:
[2], tf.float
- property spacing
Element spacing [m] corresponding to half a wavelength
- Type:
tf.float
- property velocity
Get/set the velocity vector [m/s]
- Type:
[3], tf.float
- property world_normal
Normal vector of the RIS in the global coordinate system (GCS)
- Type:
[3], tf.float
PhaseProfile
- class sionna.rt.PhaseProfile(dtype=tf.complex64)[source]
Abstract class defining a phase profile of a RIS
A PhaseProfile instance is a callable that returns the profile values, gradients and Hessians at given points.
- Parameters:
dtype (tf.complex) – Datatype to be used in internal calculations. Defaults to tf.complex64.
- Input:
points (tf.float, [num_samples, 2]) – Tensor of 2D coordinates defining the points on the RIS at which the profile should be evaluated. Defaults to None. In this case, the values for all unit cells are returned.
mode (int | None) – Reradiation mode to be considered. Defaults to None. In this case, the values for all modes are returned.
return_grads (bool) – If True, also the first- and second-order derivatives are returned. Defaults to False.
- Output:
values ([num_modes, num_samples] or [num_samples], tf.float) – Interpolated profile values at the sample positions
grads ([num_modes, num_samples, 3] or [num_samples, 3], tf.float) – Gradients of the interpolated profile values at the sample positions. Only returned if return_grads is True.
hessians ([num_modes, num_samples, 3, 3] or [num_samples, 3, 3] , tf.float) – Hessians of the interpolated profile values at the sample positions. Only returned if return_grads is True.
- abstract property num_modes
Number of reradiation modes
- Type:
int
DiscretePhaseProfile
- class sionna.rt.DiscretePhaseProfile(cell_grid, num_modes=1, values=None, interpolator=None, dtype=tf.complex64)[source]
Class defining a discrete phase profile of a RIS
A discrete phase profile \(\chi_m\) assigns to each of its units cells a possibly different phase value. Multiple reradiation modes can be created by super-positioning of phase profiles.
See Reconfigurable Intelligent Surfaces (RIS) in the Primer on Electromagnetics for more details.
A class instance is a callable that returns the profile values, gradients and Hessians at given points.
- Parameters:
cell_grid (
CellGrid) – Defines the physical structure of the RISnum_modes (int) – Number of reradiation modes. Defaults to 1.
values (tf.float or tf.Variable, [num_modes, num_rows, num_cols]) – Phase values [rad] for each reradiation mode and unit cell. num_rows and num_cols are defined by the cell_grid. Defaults to None.
interpolator (
ProfileInterpolator) – Determines how the discrete values of the profile are interpolated to a continuous profile which is defined at any point on the RIS. Defaults to None. In this case, theLagrangeProfileInterpolatorwill be used.dtype (tf.complex) – Datatype to be used in internal calculations. Defaults to tf.complex64.
- Input:
points (tf.float, [num_samples, 2]) – Tensor of 2D coordinates defining the points on the RIS at which the profile should be evaluated. Defaults to None. In this case, the values for all unit cells are returned.
mode (int | None) – Reradiation mode to be considered. Defaults to None. In this case, the values for all modes are returned.
return_grads (bool) – If True, also the first- and second-order derivatives are returned. Defaults to False.
- Output:
values ([num_modes, num_samples] or [num_samples], tf.float) – Interpolated profile values at the sample positions
grads ([num_modes, num_samples, 3] or [num_samples, 3], tf.float) – Gradients of the interpolated profile values at the sample positions. Only returned if return_grads is True.
hessians ([num_modes, num_samples, 3, 3] or [num_samples, 3, 3] , tf.float) – Hessians of the interpolated profile values at the sample positions. Only returned if return_grads is True.
- property num_modes
Number of reradiation modes
- Type:
int
- property shape
Shape of the tensor holding the values of the discrete profile
- Type:
tf.TensorShape
- show(mode=0)
Visualizes the profile as a 3D plot
- Input:
mode (int | None) – Reradation mode to be shown. Defaults to 0.
- Output:
matplotlib.pyplot.Figure– 3D plot of the profile
- property spacing
Element spacing [m] corresponding to half a wavelength
- Type:
tf.float
- property values
Set/get the discrete values of the profile for each reradiation mode
- Type:
[shape], tf.float
AmplitudeProfile
- class sionna.rt.AmplitudeProfile(dtype=tf.complex64)[source]
Abstract class defining an amplitude profile of a RIS
An AmplitudeProfile instance is a callable that returns the profile values, gradients and Hessians at given points.
- Parameters:
dtype (tf.complex) – Datatype to be used in internal calculations. Defaults to tf.complex64.
- Input:
points (tf.float, [num_samples, 2]) – Tensor of 2D coordinates defining the points on the RIS at which the profile should be evaluated. Defaults to None. In this case, the values for all unit cells are returned.
mode (int | None) – Reradiation mode to be considered. Defaults to None. In this case, the values for all modes are returned.
return_grads (bool) – If True, also the first- and second-order derivatives are returned. Defaults to False.
- Output:
values ([num_modes, num_samples] or [num_samples], tf.float) – Interpolated profile values at the sample positions
grads ([num_modes, num_samples, 3] or [num_samples, 3], tf.float) – Gradients of the interpolated profile values at the sample positions. Only returned if return_grads is True.
hessians ([num_modes, num_samples, 3, 3] or [num_samples, 3, 3] , tf.float) – Hessians of the interpolated profile values at the sample positions. Only returned if return_grads is True.
- abstract property mode_powers
Relative power of reradiation modes
- Type:
[num_modes], tf.float
- abstract property num_modes
Number of reradiation modes
- Type:
int
DiscreteAmplitudeProfile
- class sionna.rt.DiscreteAmplitudeProfile(cell_grid, num_modes=1, values=None, mode_powers=None, interpolator=None, dtype=tf.complex64)[source]
Class defining a discrete amplitude profile of a RIS
A discrete amplitude profile \(A_m\) assigns to each of its units cells a possibly different amplitude value. Multiple reradiation modes can be obtained by super-positioning of profiles. The relative power of reradiation modes can be controlled via the reradiation coefficients \(p_m\).
See Reconfigurable Intelligent Surfaces (RIS) for more details.
A class instance is a callable that returns the profile values, gradients and Hessians at given points.
- Parameters:
cell_grid (
CellGrid) – Defines the physical structure of the RISnum_modes (int) – Number of reradiation modes. Defaults to 1.
values (tf.float or tf.Variable, [num_modes, num_rows, num_cols]) – Amplitude values for each reradiation mode and unit cell. num_rows and num_cols are defined by the cell_grid. Defaults to None.
mode_powers (tf.float, [num_modes]) – Relative powers or reradition coefficients of reradiation modes. Defaults to None. In this case, all reradiation modes get an equal fraction of the total power.
interpolator (
ProfileInterpolator) – Determines how the discrete values of the profile are interpolated to a continuous profile which is defined at any point on the RIS. Defaults to None. In this case, theLagrangeProfileInterpolatorwill be used.dtype (tf.complex) – Datatype to be used in internal calculations. Defaults to tf.complex64.
- Input:
points (tf.float, [num_samples, 2]) – Tensor of 2D coordinates defining the points on the RIS at which the profile should be evaluated. Defaults to None. In this case, the values for all unit cells are returned.
mode (int | None) – Reradiation mode to be considered. Defaults to None. In this case, the values for all modes are returned.
return_grads (bool) – If True, also the first- and second-order derivatives are returned. Defaults to False.
- Output:
values ([num_modes, num_samples] or [num_samples], tf.float) – Interpolated profile values at the sample positions
grads ([num_modes, num_samples, 3] or [num_samples, 3], tf.float) – Gradients of the interpolated profile values at the sample positions. Only returned if return_grads is True.
hessians ([num_modes, num_samples, 3, 3] or [num_samples, 3, 3] , tf.float) – Hessians of the interpolated profile values at the sample positions. Only returned if return_grads is True.
- property mode_powers
Relative power of reradiation modes
- Type:
[num_modes], tf.float
- property num_modes
Number of reradiation modes
- Type:
int
- property shape
Shape of the tensor holding the values of the discrete profile
- Type:
tf.TensorShape
- show(mode=0)
Visualizes the profile as a 3D plot
- Input:
mode (int | None) – Reradation mode to be shown. Defaults to 0.
- Output:
matplotlib.pyplot.Figure– 3D plot of the profile
- property spacing
Element spacing [m] corresponding to half a wavelength
- Type:
tf.float
- property values
Set/get the discrete values of the profile for each reradiation mode
- Type:
[shape], tf.float
ProfileInterpolator
- class sionna.rt.ProfileInterpolator(discrete_profile)[source]
Abstract class defining an interpolator of a discrete profile
A ProfileInterpolator instance is a callable that interpolate the discrete profile to specified points. Optionally, the gradients and Hessians are returned.
- Parameters:
discrete_profile (
DiscreteProfile) – Discrete profile to be interpolated- Input:
points ([num_samples, 2], tf.float) – Positions at which to interpolate the profile
mode (int | None) – Mode of the profile to interpolate. If None. all modes are interpolated. Defaults to None.
return_grads (bool) – If True, gradients and Hessians are computed. Defaults to False.
- Output:
values ([num_modes, num_samples] or [num_samples], tf.float) – Interpolated profile values at the sample positions
grads ([num_modes, num_samples, 3] or [num_samples, 3], tf.float) – Gradients of the interpolated profile values at the sample positions
hessians ([num_modes, num_samples, 3, 3] or [num_samples,3,3], tf.float) – Hessians of the interpolated profile values at the sample positions
- property spacing
Element spacing [m] corresponding to half a wavelength
- Type:
tf.float
LagrangeProfileInterpolator
- class sionna.rt.LagrangeProfileInterpolator(discrete_profile)[source]
Class defining a
ProfileInterpolatorusing Lagrange polynomialsThe class instance is a callable that interpolates a discrete profile at arbitrary positions using two-dimensional 2nd-order Lagrange interpolation.
A discrete profile \(P(y_i,z_j)\in\mathbb{R}\) defined on a grid of points \(y_i,z_j\) for \(i,j \in [1,2,3]\) is interpolated to position \(y,z\) as
\[\begin{align} P(y,z) &= \sum_{i,j} P(y_i,z_j) \ell_{i,y}(y) \ell_{j,z}(z) \end{align}\]where \(\ell_{i,y}(y)\), \(\ell_{j,z}(z)\) are the one-dimensional 2nd-order Lagrange polynomials, defined as
\[\begin{split}\begin{align} \ell_{i,y}(y) &= \prod_{j \ne i} \frac{y-y_j}{y_i-y_j} \\ \ell_{j,z}(z) &= \prod_{i \ne j} \frac{z-z_i}{z_j-z_i}. \end{align}\end{split}\]Note that the formulation above assumes for simplicity only a 3x3 grid of points. However, the implementation finds for every position the closest 3x3 grid points of the discrete profile which are used for interpolation.
In order to compute spatial gradients and Hessians, we extend the the profile with a dummy \(x\) dimension, i.e., \(P(x,y,z)=P(y,z)\), such that
\[\begin{split}\begin{align} \nabla P(x,y,z) &= \begin{bmatrix} 0, \frac{\partial P(x,y,z)}{\partial y}, \frac{\partial P(x,y,z)}{\partial z} \end{bmatrix}^{\textsf{T}}\\ H_P(x,y,z) &= \begin{bmatrix} 0 & 0 & 0 \\ 0 & \frac{\partial^2 P(x,y,z)}{\partial y^2} & \frac{\partial^2 P(x,y,z)}{\partial y \partial z} \\ 0 & \frac{\partial^2 P(x,y,z)}{\partial z \partial y} & \frac{\partial^2 P(x,y,z)}{\partial z^2} \end{bmatrix} \end{align}.\end{split}\]- Parameters:
discrete_profile (
DiscreteProfile) – Discrete profile to be interpolated- Input:
points ([num_samples, 2], tf.float) – Positions at which to interpolate the profile
mode (int | None) – Mode of the profile to interpolate. If None, all modes are interpolated. Defaults to None.
return_grads (bool) – If True, gradients and Hessians are computed. Defaults to False.
- Output:
values ([num_modes, num_samples] or [num_samples], tf.float) – Interpolated profile values at the sample positions
grads ([num_modes, num_samples, 3] or [num_samples, 3], tf.float) – Gradients of the interpolated profile values at the sample positions
hessians ([num_modes, num_samples, 3, 3] or [num_samples, 3, 3] , tf.float) – Hessians of the interpolated profile values at the sample positions
- static lagrange_polynomials(x, x_i, return_derivatives=True)[source]
Compute the 2nd-order Lagrange polynomials
Optionally, the first- and second-order derivatives are returned.
The 2nd-order Lagrange polynomials \(\ell_j(x)\), \(j=1,2,3\), for position \(x\in\mathbb{R}\) are computed using three distinct support positions \(x_i\) for \(i=1,2,3\):
\[\begin{split}\begin{align} \ell_j(x) &= \prod_{\substack{1\leq i \leq 3 \\ i \ne j}} \frac{x-x_i}{x_j-x_i}. \end{align}\end{split}\]Their first- and second-order derivatives are then respectively given as
\[\begin{split}\begin{align} \ell'_j(x) &= \left(\sum_{i \ne j} x-x_i\right) \left(\prod_{i \ne j} x_j-x_i\right)^{-1} \\ \ell''_j(x) &= 2 \left(\prod_{i \ne j} x_j-x_i\right)^{-1}. \end{align}\end{split}\]- Input:
x ([batch_size], tf.float) – Sample positions
x_i ([batch_size, 3], tf.float) – Support positions for every sample position
return_derivatives (bool) – If True, also the first- and second-order derivatives of the Lagrange polynomials are returned. Defaults to True.
- Output:
l_i ([batch_size, 3], tf.float) – Lagrange polynomials for each sample position
deriv_1st ([batch_size, 3], tf.float) – First-order derivatives for each sample position. Only returned if return_derivatives is True.
deriv_2nd ([batch_size, 3], tf.float) – Second-order derivatives for each sample position. Only returned if return_derivatives is True.
- property spacing
Element spacing [m] corresponding to half a wavelength
- Type:
tf.float
CellGrid
- class sionna.rt.CellGrid(num_rows, num_cols, dtype=tf.complex64)[source]
Class defining a cell grid that determines the physical structure of a RIS
The cell grid specifies the location of unit cells within the y-z plane assuming a homogenous spacing of 0.5. The actual positions are computed by multiplying the cell positions by the wavelength and rotating them according to the RIS’ orientation.
A cell grid must have at least three columns and rows to ensure that discrete phase and amplitude profiles of the RIS can be interpolated.
- Parameters:
num_rows (int) – Number of rows. Must at least be equal to three.
num_cols (int) – Number of columns. Must at least be equal to three.
dtype (tf.complex) – Datatype to be used in internal calculations. Defaults to tf.complex64.
- property cell_positions
Cell positions ordered from top-to-bottom left-to-right
- Type:
[num_cells, 2], tf.float
- property cell_y_positions
y-coordinates of cells ordered from left-to-right
- Type:
[num_cols], tf.float
- property cell_z_positions
z-coordinates of cells ordered from top-to-bottom
- Type:
[num_rows], tf.float
- property num_cells
Number of cells
- Type:
int
- property num_cols
Number of columns
- Type:
int
- property num_rows
Number of rows
- Type:
int
Utility Functions
cross
dot
- sionna.rt.dot(u, v, keepdim=False, clip=False)[source]
Computes and the dot (or scalar) product between u and v
- Input:
u ([…,3]) – First vector
v ([…,3]) – Second vector
keepdim (bool) – If True, keep the last dimension. Defaults to False.
clip (bool) – If True, clip output to [-1,1]. Defaults to False.
- Output:
[…,1] or […] – Dot product between
uandv. The last dimension is removed ifkeepdimis set to False.
outer
normalize
phi_hat
- sionna.rt.phi_hat(phi)[source]
Computes the spherical unit vector \(\hat{\boldsymbol{\varphi}}(\theta, \varphi)\) as defined in (1)
- Input:
phi (same shape as
theta, tf.float) – Azimuth angles \(\varphi\) [rad]- Output:
theta_hat (
phi.shape+ [3], tf.float) – Vector \(\hat{\boldsymbol{\varphi}}(\theta, \varphi)\)
rotate
- sionna.rt.rotate(p, angles, inverse=False)[source]
Rotates points
pby theanglesaccording to the 3D rotation defined in (3)- Input:
p ([…,3], tf.float) – Points to rotate
angles ([…, 3]) – Angles for the rotations [rad]. The last dimension corresponds to the angles \((\alpha,\beta,\gamma)\) that define rotations about the axes \((z, y, x)\), respectively.
inverse (bool) – If True, the inverse rotation is applied, i.e., the transpose of the rotation matrix is used. Defaults to False
- Output:
[…,3] – Rotated points
p
rotation_matrix
- sionna.rt.rotation_matrix(angles)[source]
Computes rotation matrices as defined in (3)
The closed-form expression in (7.1-4) [TR38901] is used.
- Input:
angles ([…,3], tf.float) – Angles for the rotations [rad]. The last dimension corresponds to the angles \((\alpha,\beta,\gamma)\) that define rotations about the axes \((z, y, x)\), respectively.
- Output:
[…,3,3], tf.float – Rotation matrices
rot_mat_from_unit_vecs
r_hat
- sionna.rt.r_hat(theta, phi)[source]
Computes the spherical unit vetor \(\hat{\mathbf{r}}(\theta, \phi)\) as defined in (1)
- Input:
theta (arbitrary shape, tf.float) – Zenith angles \(\theta\) [rad]
phi (same shape as
theta, tf.float) – Azimuth angles \(\varphi\) [rad]
- Output:
rho_hat (
phi.shape+ [3], tf.float) – Vector \(\hat{\mathbf{r}}(\theta, \phi)\) on unit sphere
sample_points_on_hemisphere
- sionna.rt.sample_points_on_hemisphere(normals, num_samples=1)[source]
Randomly sample points on hemispheres defined by their normal vectors
- Input:
normals ([batch_size, 3], tf.float) – Normal vectors defining hemispheres
num_samples (int) – Number of random samples to draw for each hemisphere defined by its normal vector. Defaults to 1.
- Output:
points ([batch_size, num_samples, 3], tf.float or [batch_size, 3], tf.float if num_samples=1.) – Random points on the hemispheres
theta_hat
- sionna.rt.theta_hat(theta, phi)[source]
Computes the spherical unit vector \(\hat{\boldsymbol{\theta}}(\theta, \varphi)\) as defined in (1)
- Input:
theta (arbitrary shape, tf.float) – Zenith angles \(\theta\) [rad]
phi (same shape as
theta, tf.float) – Azimuth angles \(\varphi\) [rad]
- Output:
theta_hat (
phi.shape+ [3], tf.float) – Vector \(\hat{\boldsymbol{\theta}}(\theta, \varphi)\)
theta_phi_from_unit_vec
- sionna.rt.theta_phi_from_unit_vec(v)[source]
Computes zenith and azimuth angles (\(\theta,\varphi\)) from unit-norm vectors as described in (2)
- Input:
v ([…,3], tf.float) – Tensor with unit-norm vectors in the last dimension
- Output:
theta ([…], tf.float) – Zenith angles \(\theta\)
phi ([…], tf.float) – Azimuth angles \(\varphi\)
watt_to_dbm
dbm_to_watt
- sionna.rt.dbm_to_watt(dbm)[source]
Converts dBm to Watt via the formula: \(P_W = 10^{\frac{P_{dBm}-30}{10}}\)
- Input:
dbm (float) – Power [dBm]
- Output:
float – Power [W]
- References:
- [Balanis97] (1,2)
A. Balanis, “Antenna Theory: Analysis and Design,” 2nd Edition, John Wiley & Sons, 1997.
[ITUR_P2040_2] (1,2)ITU-R, “Effects of building materials and structures on radiowave propagation above about 100 MHz“, Recommendation ITU-R P.2040-2
[SurfaceIntegral]Wikipedia, “Surface integral”, accessed Jun. 22, 2023.
[Wiffen2018]F. Wiffen et al., “Comparison of OTFS and OFDM in Ray Launched sub-6 GHz and mmWave Line-of-Sight Mobility Channels”, Proc. IEEE Int. Sym. Personal, Indoor and Mobil Radio Commun. (PIMRC), Bologna, Italy, Sep. 2018.